Grove 超音波距離センサ を動かす
今回のプログラムはどのように動くか
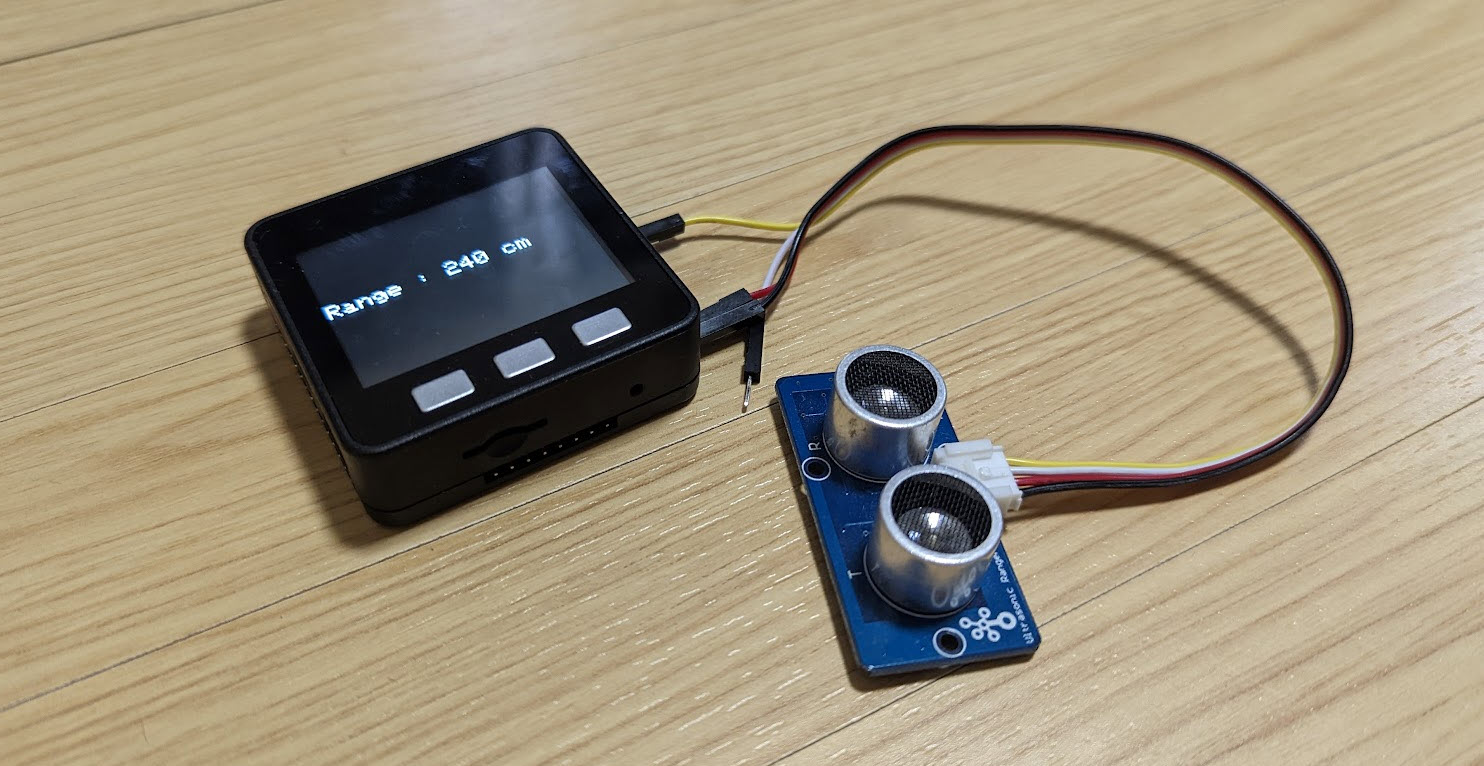
書き込むと障害物とセンサーの距離データが表示されます。
Grove への Grove ケーブルのつなぎかた
Grove と Grove ケーブルのツメを合わせるように差し込みます。
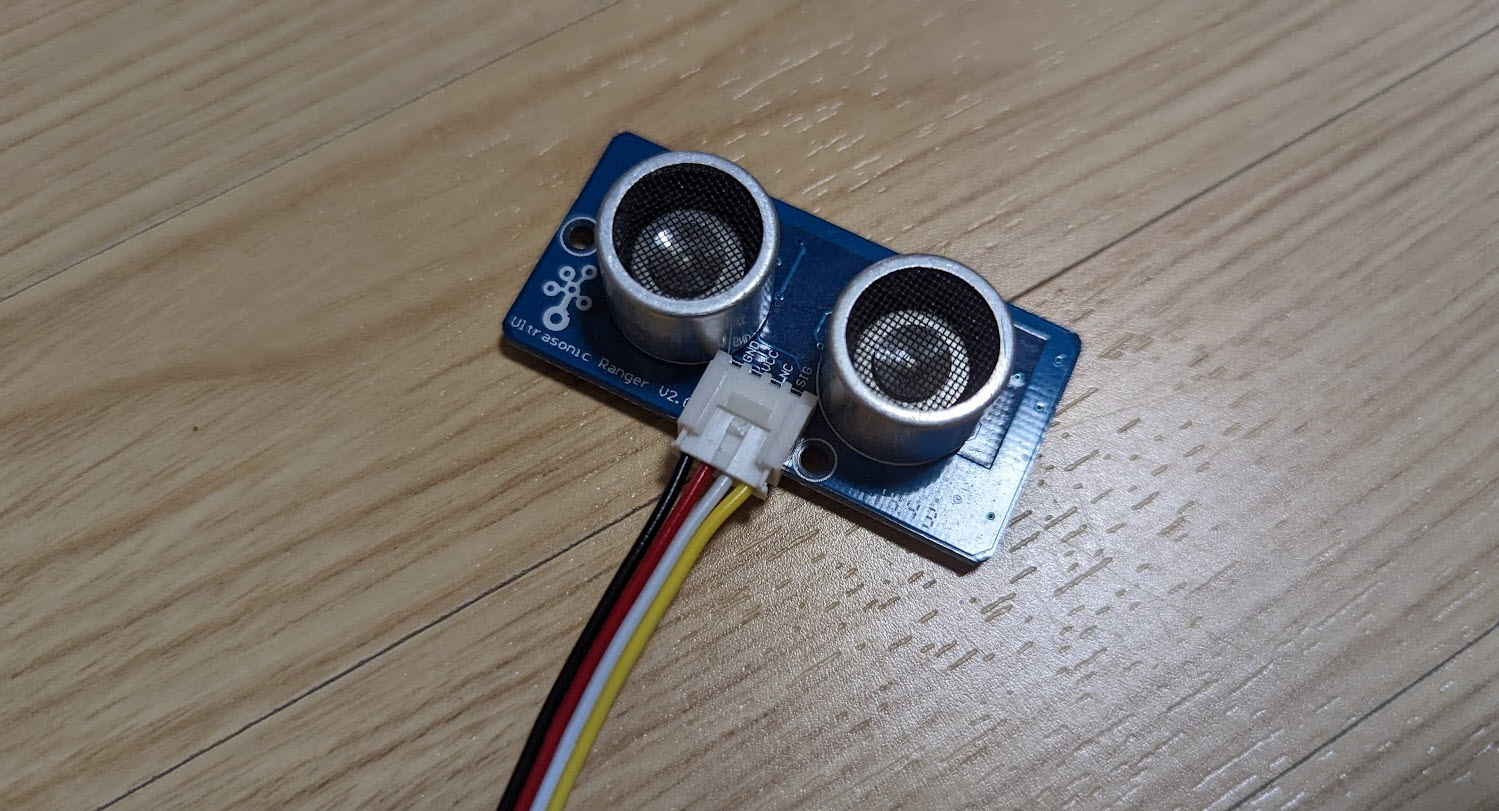
このように差し込みました。
M5Stack への Grove ケーブルのつなぎかた

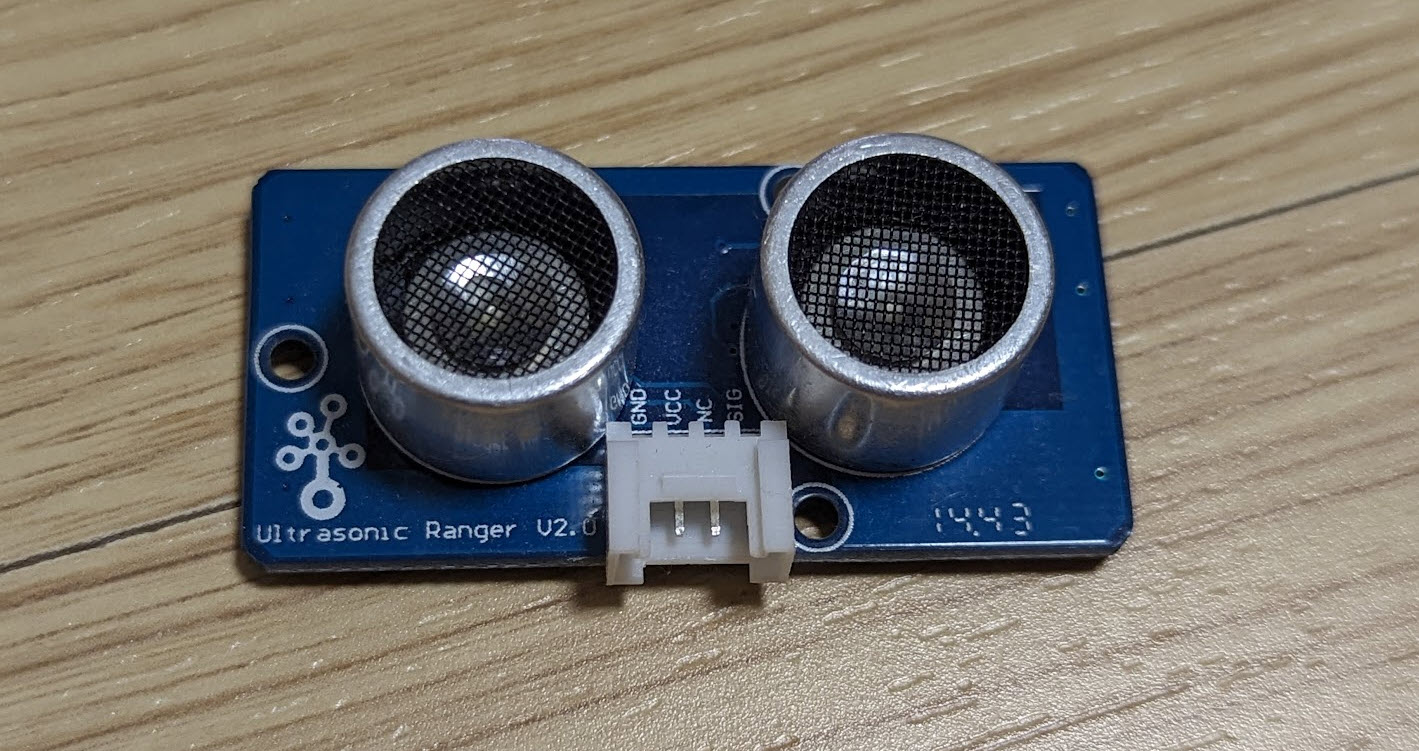
裏面右側のピン番号を合わせて以下のようにつなぎます。
- 赤ケーブル
- 5V
- 黒ケーブル
- G
- 白ケーブル
- つながない
- 黄ケーブル
- 2
ライブラリをインストール
GitHub の Grove 超音波距離センサセンサーのライブラリページ にアクセスします。
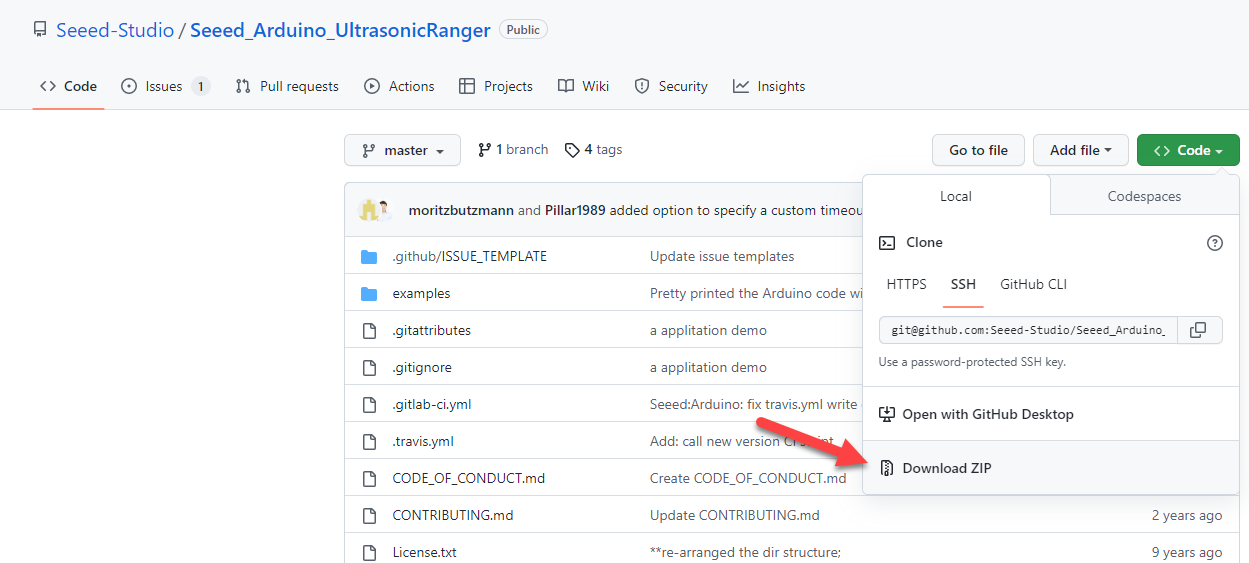
Code ボタンをクリックして Download ZIP ボタンからダウンロードします。
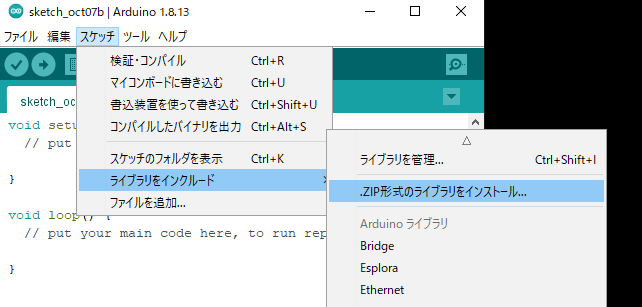
スケッチ > ライブラリをインクルード > .ZIP形式のライブラリをインストール をクリックします。
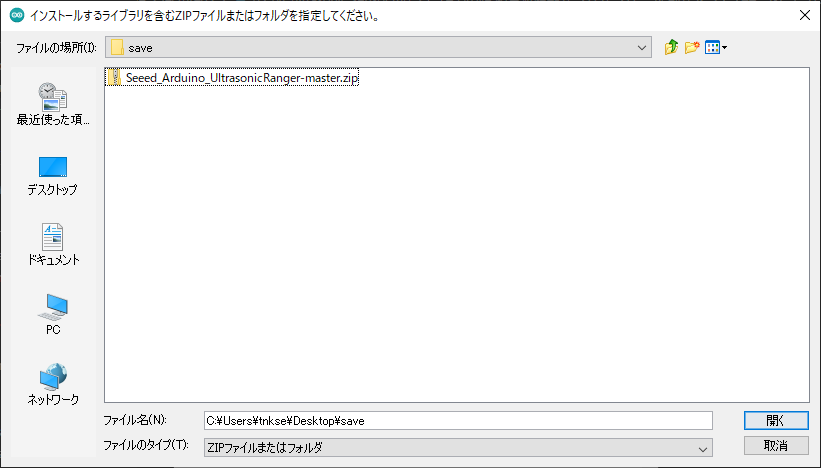
先ほどダウンロードした ZIP ファイルを選択してインストールします。こちらは Windows のファイル選択ですが、Mac の人は適宜読み替えてください。
これでインストール完了です。
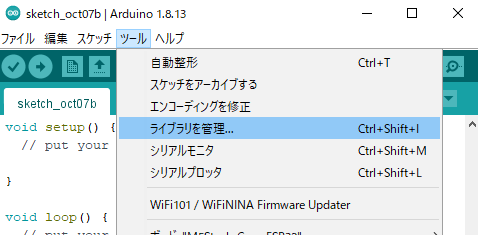
ツール > ライブラリを管理で、
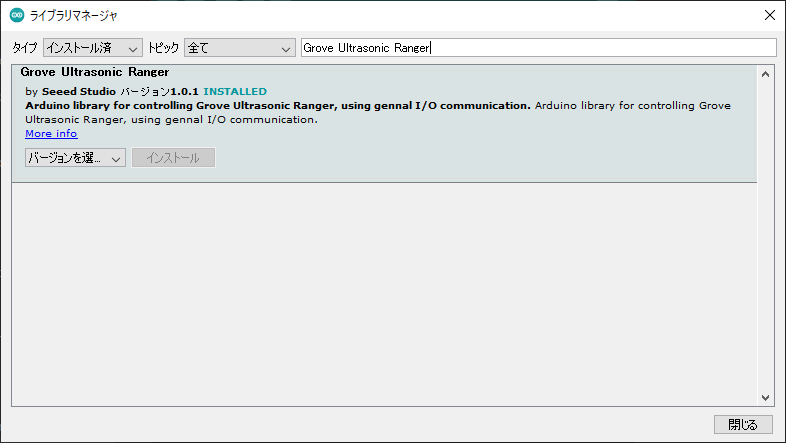
タイプをインストール済みで絞り込んで、Grove Ultrasonic Ranger がインストールされていればインストール成功です。
ソースコードを反映&保存
Arduino IDE で新規ファイルを作成し、以下のコードをコピーアンドペーストします。こちらを dhw-pp2-study-03-08-UltraSonicRanger-sensor というファイル名で保存します。
#include <M5Stack.h>
// 今回のセンサーライブラリの呼び出し
#include "Ultrasonic.h"
// 黄色いケーブルを挿すピンは 2 番ピン
Ultrasonic ultrasonic(2);
void setup() {
// init lcd, serial, but don't init sd card
M5.begin(true, false, true);
Wire.begin();
M5.Power.begin();
M5.Lcd.clear(BLACK);
M5.Lcd.setTextSize(3);
M5.Lcd.println("UltraSonic");
M5.Lcd.print("Ranger");
M5.Lcd.setTextColor(WHITE);
}
void loop() {
M5.update();
M5.Lcd.clear(BLACK);
M5.Lcd.setCursor(0, 100);
long RangeInCentimeters;
RangeInCentimeters = ultrasonic.MeasureInCentimeters();
Serial.print(RangeInCentimeters); // 0 ~ 400cm
Serial.println(" cm");
M5.Lcd.print("Range : ");
M5.Lcd.print(RangeInCentimeters);
M5.Lcd.println(" cm");
delay(1000); // データ取得のため 250 ms 以上のインターバルを持つ
}
M5Stack に書き込んでみる

M5Stack に書き込んでみましょう。
動かしてみる
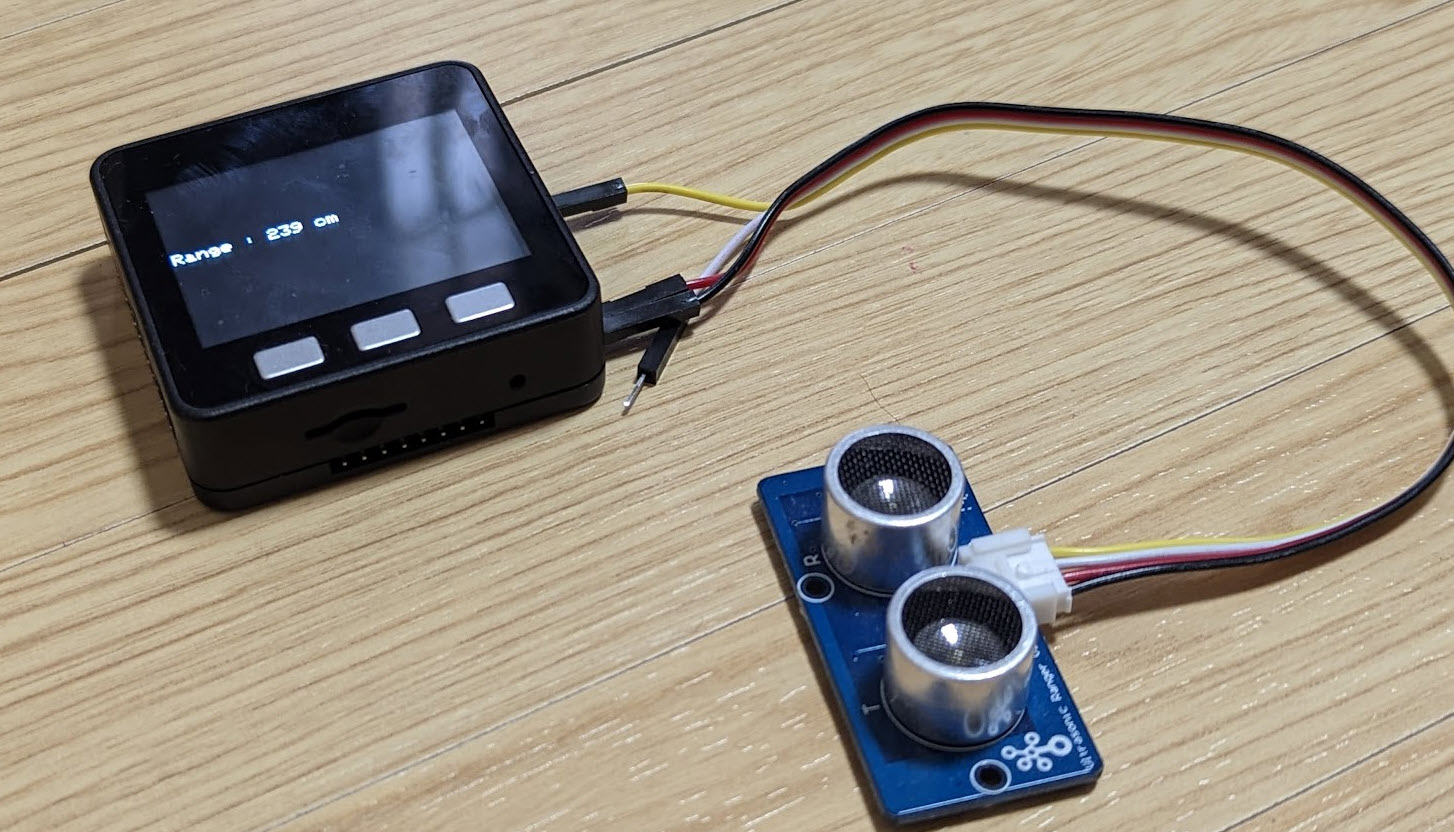
動かしてみると、このように障害物とセンサーの距離データが表示されます。
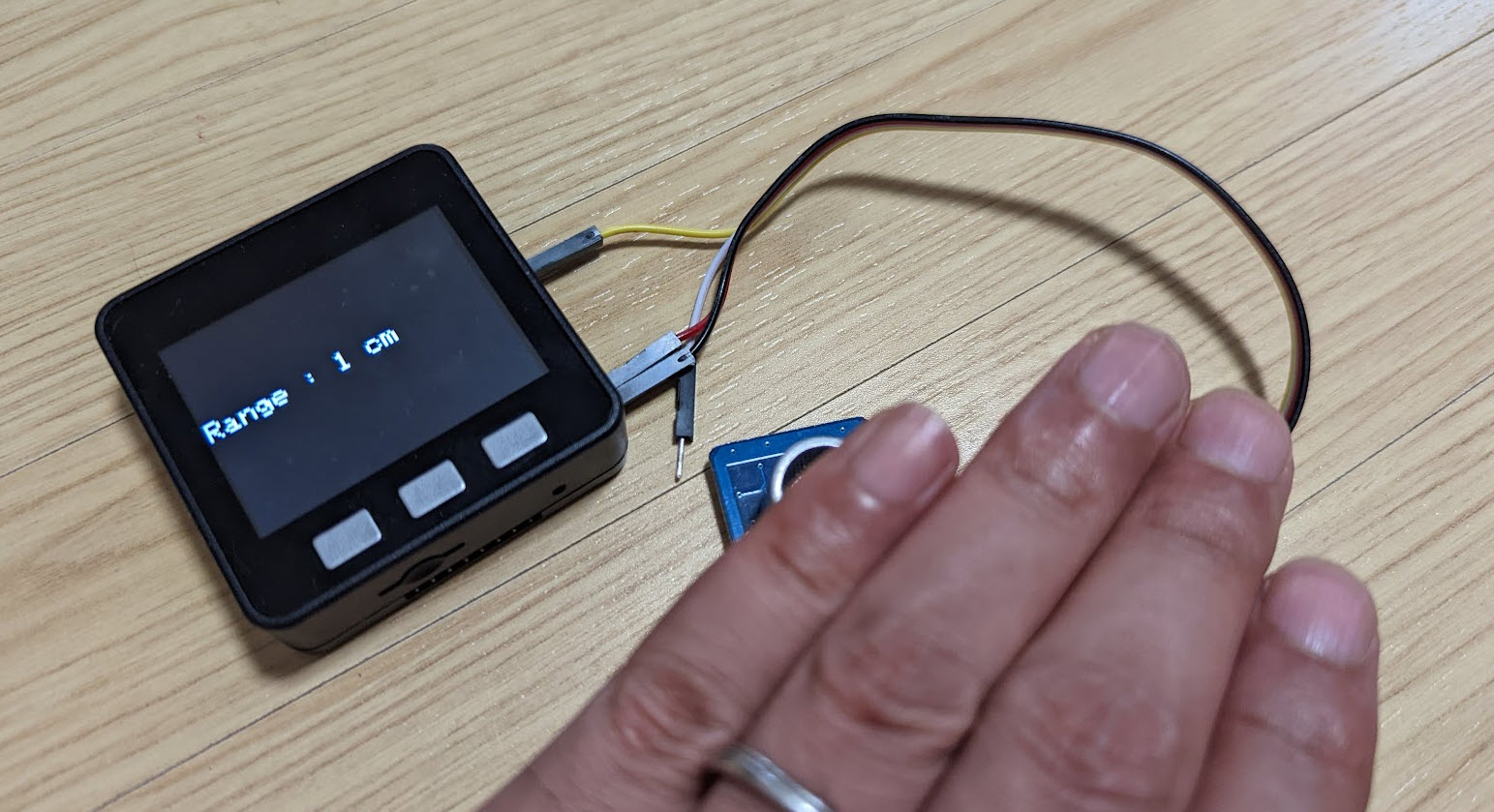
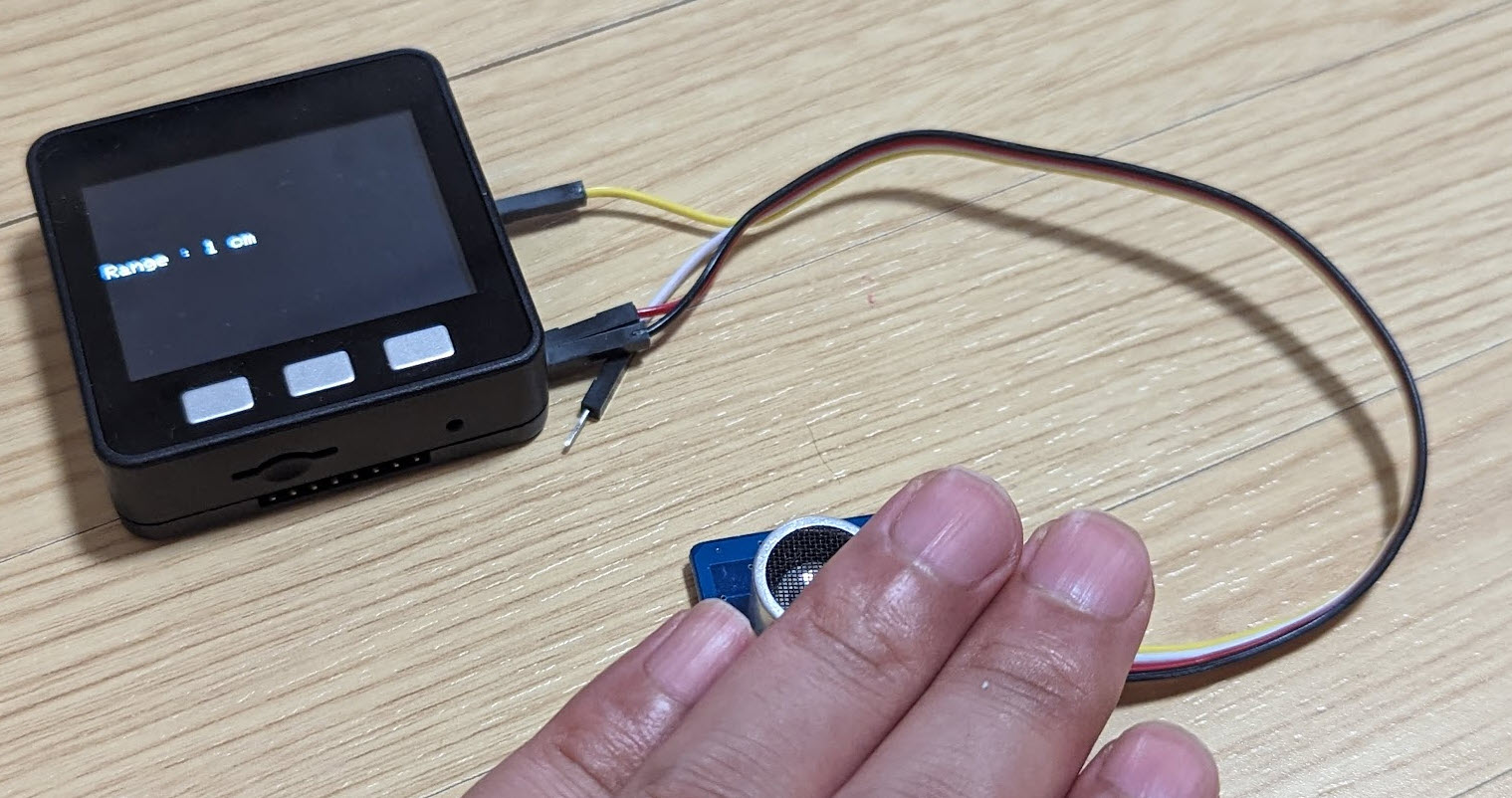
手で距離を縮めてみると変化します。
LINE BOT と連携するソースコードを試す
Arduino IDE で新規ファイルを作成し、以下のコードをコピーアンドペーストします。こちらを dhw-pp2-study-03-09-UltraSonicRanger-sensor-LINEBOT というファイル名で保存します。
#include <M5Stack.h>
// HTTP 通信を行うライブラリ
#include <HTTPClient.h>
// Wi-FiのSSID
char *ssid = "Wi-FiのSSID";
// Wi-Fiのパスワード
char *password = "Wi-Fiのパスワード";
// 今回のセンサーライブラリの呼び出し
#include "Ultrasonic.h"
// 黄色いケーブルを挿すピンは 2 番ピン
Ultrasonic ultrasonic(2);
// カウントダウン用変数 メッセージを送った時間
long messageSentAt = 0;
void setup() {
// init lcd, serial, but don't init sd card
// LCD ディスプレイとシリアルは動かして、SDカードは動かさない設定
M5.begin(true, false, true);
// スタート
M5.Lcd.fillScreen(BLACK);
M5.Lcd.setCursor(10, 10);
M5.Lcd.setTextColor(WHITE);
M5.Lcd.setTextSize(2);
// Arduino のシリアルモニタ・M5Stack LCDディスプレイ両方にメッセージを出す
Serial.print("START"); // Arduino のシリアルモニタにメッセージを出す
M5.Lcd.print("START"); // M5Stack LCDディスプレイにメッセージを出す(英語のみ)
// WiFi 接続開始
WiFi.begin(ssid, password);
// 勝手に Button A が押されることを回避
WiFi.setSleep(false);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
// Arduino のシリアルモニタ・M5Stack LCDディスプレイ両方にメッセージを出す
Serial.print(".");
M5.Lcd.print(".");
}
// WiFi Connected
// WiFi 接続完了
M5.Lcd.setCursor(10, 40);
M5.Lcd.setTextColor(WHITE);
M5.Lcd.setTextSize(2);
// Arduino のシリアルモニタ・M5Stack LCDディスプレイ両方にメッセージを出す
// 前のメッセージが print で改行入っていないので println で一つ入れる
Serial.println(""); // Arduino のシリアルモニタにメッセージを出し改行が最後に入る
M5.Lcd.println(""); // M5Stack LCDディスプレイにメッセージを出す改行が最後に入る(英語のみ)
// Arduino のシリアルモニタ・M5Stack LCDディスプレイ両方にメッセージを出す
Serial.println("WiFi Connected."); // Arduino のシリアルモニタにメッセージを出す
M5.Lcd.println("WiFi Connected."); // M5Stack LCDディスプレイにメッセージを出す(英語のみ)
// 起動時に送る
delay(1000);
send_message("{\"message\":\"Launched!\"}");
}
// HTTP でメッセージ送信部分
void send_message(String msg) {
// 今回送るホスト名 GitPod のホスト名 (https://なし)を反映
// https://3000-hoge-fuga-scnzIUgdS.gitpod.io/ の場合は 3000-hoge-fuga-scnzIUgdS.gitpod.io
String hostName = "*********************.gitpod.io";
// 今回送るURL
String url = "https://" + hostName + "/from/m5stack";
Serial.println("-> send_message");
Serial.print("msg: ");
Serial.println(msg);
// 送るデータ
String queryString = msg;
// HTTPClient 準備
HTTPClient httpClient;
// URL 設定
httpClient.begin(url);
// Content-Type
httpClient.addHeader("Content-Type", "application/json");
// データ送信完了
Serial.println("sended.");
// ポストする
int status_code = httpClient.POST(queryString);
if( status_code == 200 ){
String response = httpClient.getString();
Serial.println("response:");
Serial.println(response);
}
httpClient.end();
delay(2000);
}
void loop() {
M5.update();
// 以前の時間から現在の時間 millis() でどれだけ経過したかを計算
long spanTime = millis() - messageSentAt;
// 5秒 = 5000ミリ秒に1回送る
// センサー取得時間は3秒くらいは確保する
if (spanTime > 5000) {
// 送った時間を更新
messageSentAt = millis();
M5.Lcd.clear(BLACK);
M5.Lcd.setCursor(0, 100);
// センサーデータを取得
long RangeInCentimeters;
RangeInCentimeters = ultrasonic.MeasureInCentimeters();
Serial.print(RangeInCentimeters); // 0 ~ 400cm
Serial.println(" cm");
M5.Lcd.print("Range : ");
M5.Lcd.print(RangeInCentimeters);
M5.Lcd.println(" cm");
// 50 cm 以下は接近とする
if(RangeInCentimeters < 50){
// JSON 形式のメッセージを送る
send_message("{\"message\":\"(o_o)< ALERT!!\"}");
} else {
// JSON 形式のメッセージを送る
send_message("{\"message\":\"(-_-)\"}");
}
}
if (M5.BtnA.wasReleased()) {
// A ボタンを押したら JSON 形式のメッセージを飛ばす
// \" はダブルクォーテーションで囲まれた中で JSON 内のダブルクォーテーションを表現するために \" でエスケープしてます。
send_message("{\"message\":\"Pushed A\"}");
} else if (M5.BtnB.wasReleased()) {
// B ボタンを押したら JSON 形式のメッセージを飛ばす
send_message("{\"message\":\"Pushed B\"}");
} else if (M5.BtnC.wasReleased()) {
// C ボタンを押したら JSON 形式のメッセージを飛ばす
send_message("{\"message\":\"Pushed C\"}");
}
delay(1000);
}
Wi-Fi 情報を反映
// Wi-FiのSSID
char *ssid = "Wi-FiのSSID";
// Wi-Fiのパスワード
char *password = "Wi-Fiのパスワード";
自分のつなぎたい Wi-Fi の SSID とパスワードを反映します。
Gitpod のホスト名を反映
// 今回送るホスト名 Gitpod のホスト名 (https://なし)を反映
// https://3000-hoge-fuga-scnzIUgdS.gitpod.io/ の場合は 3000-hoge-fuga-scnzIUgdS.gitpod.io
String hostName = "*********************.gitpod.io";
今回送るホスト名 Gitpod のホスト名を反映します。
LINE BOT 連携のプログラムを M5Stack に書き込んでみる
そして、もう一度保存します。(大事)
M5Stack に書き込んでみましょう。
LINE BOT 連携のプログラムを M5Stack に動かしてみる
起動してみると Launched! というメッセージが Gitpod 経由で LINE BOT のほうに送られます。
5秒に1回のタイミングで、センサーからデータが取得され距離データが表示されます。
同時に、50cm 以下に近づいたら (o_o)< ALERT!! というメッセージ、それ以上距離が離れていたら (-_-) というメッセージが Gitpod 経由で LINE BOT のほうに送られます。
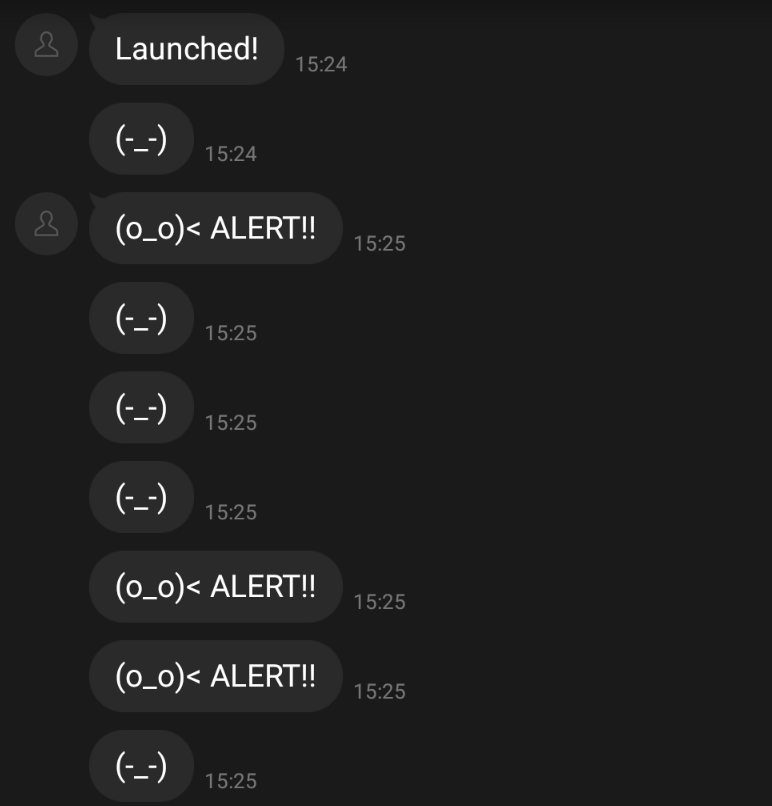
LINE BOT はこのようにメッセージが送られています。
質疑応答

ここまでで質問があればどうぞ!
次にすすみましょう
左のナビゲーションから次の教材にすすみましょう。