サーボを動かしてみよう
スターターキットにあるサーボモータを動かしてみましょう。
ドキュメントは https://obniz.com/ja/sdk/parts/ServoMotor/README.md にあります。

サーボモータと部品袋を取り出します。部品袋はまだ開けなくて OK です。
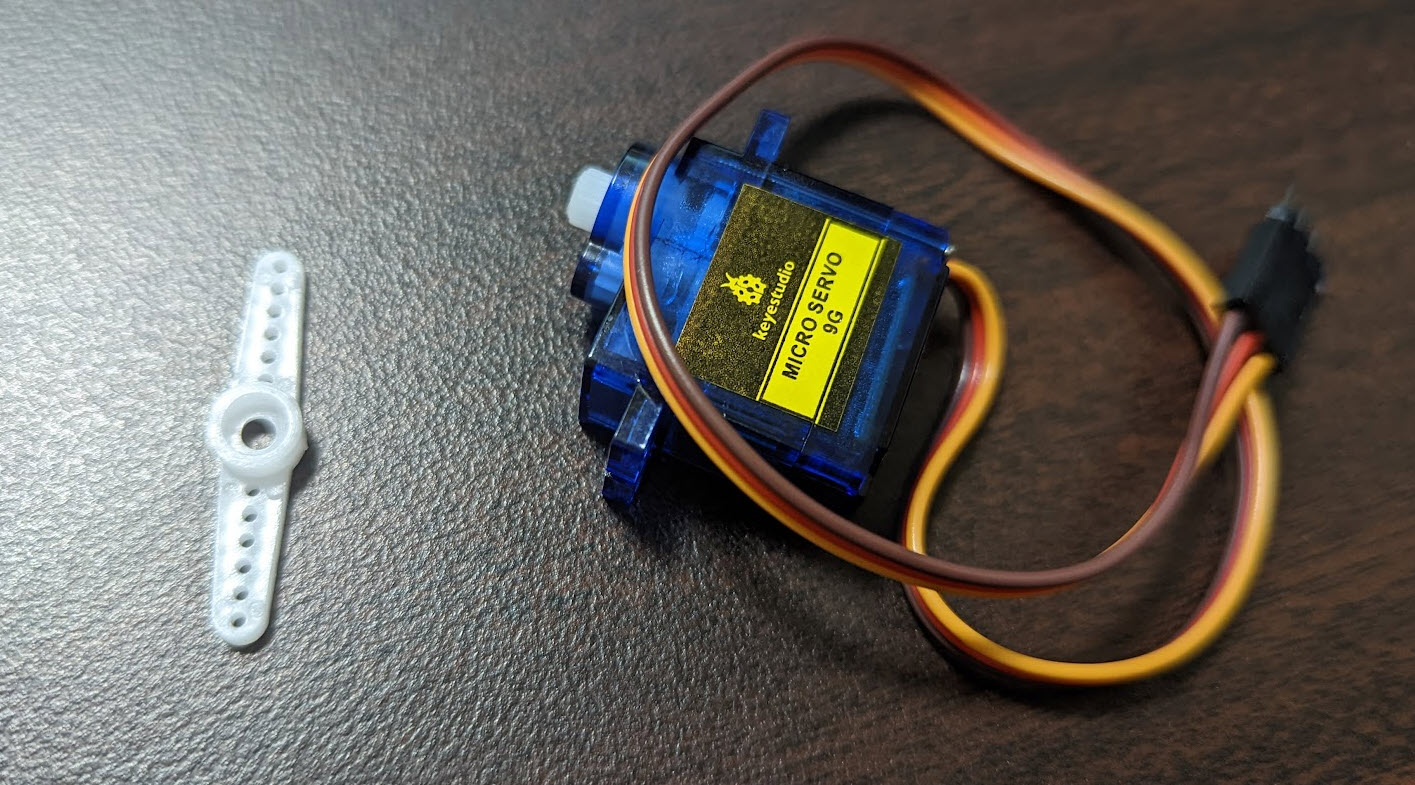
この白い部品とサーボモータをくっつけます。

この白い部品のギザギザの凹み部分とサーボモータの上部の白いギザギザの突起部分をはめ込みます。

指ではめ込みました。
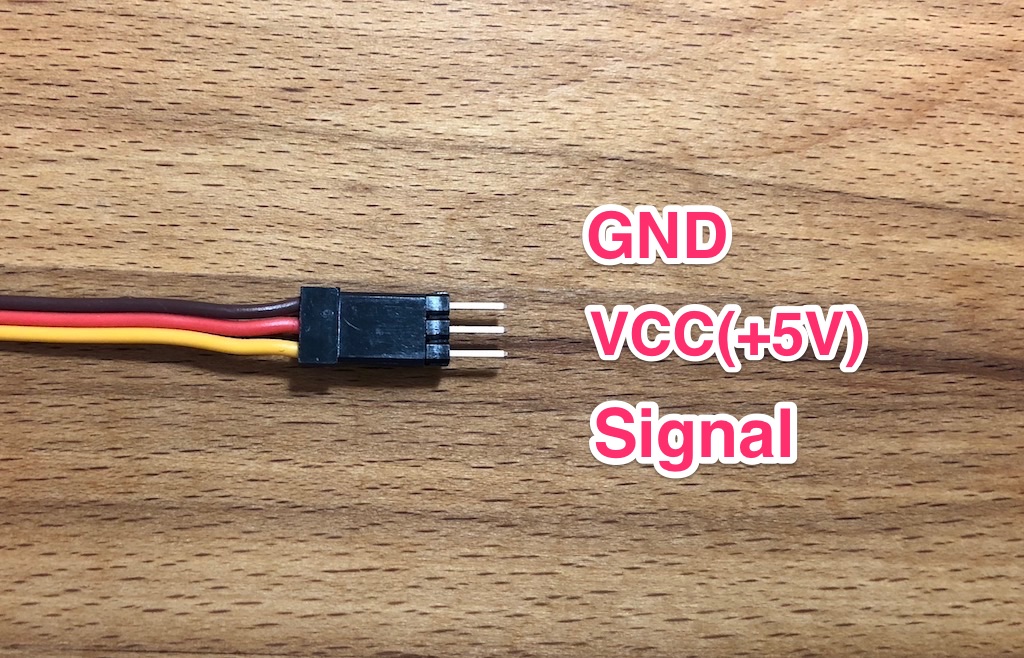
https://obniz.com/ja/sdk/parts/ServoMotor/README.md を参考に、茶色の GND ケーブルに注目します。
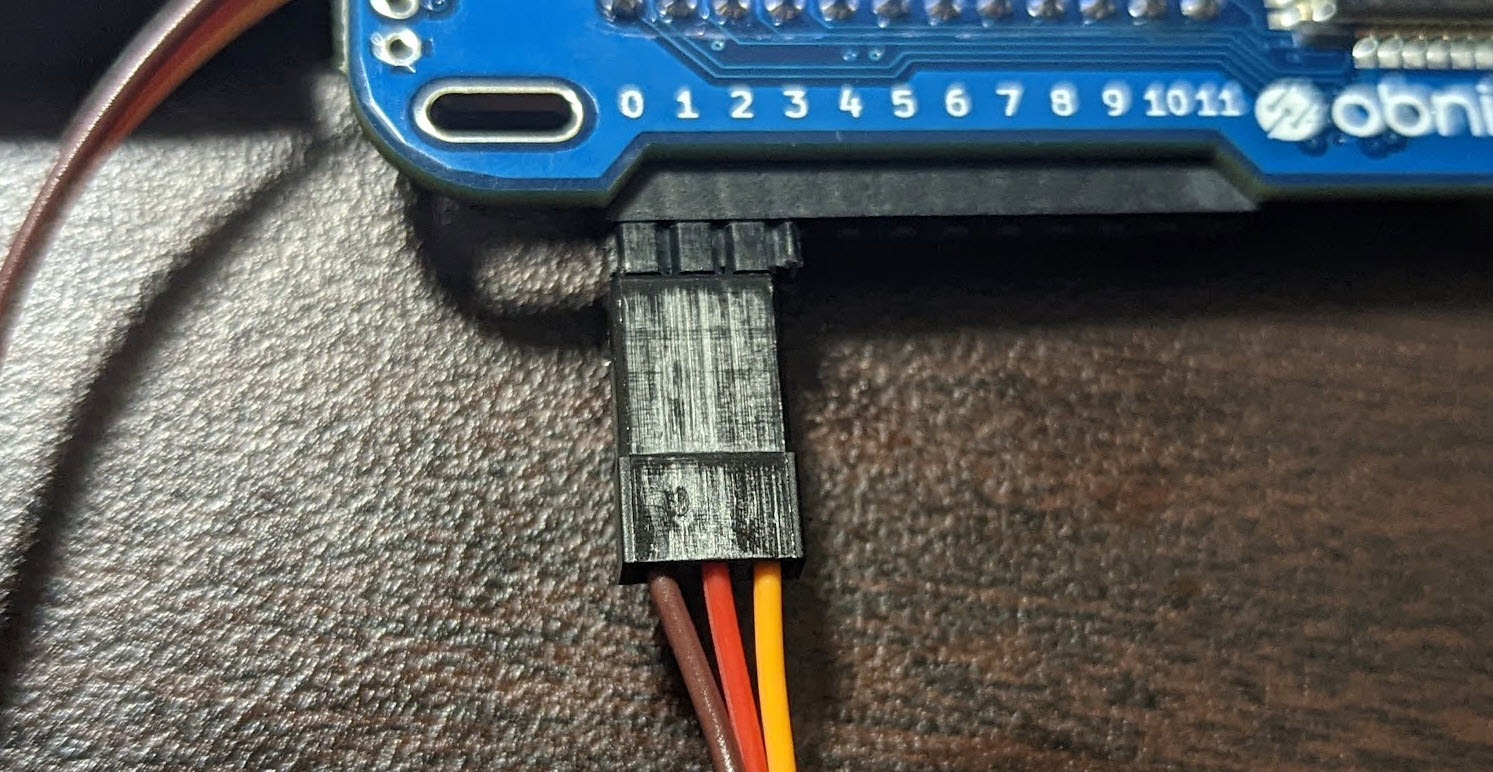
obniz の 0 番ピン穴に茶色のケーブルのピンが合う形でつなげます。
エディタに反映
こちらを以前の内容は、すべて選択して消してから、エディタの内容を上書きします。
<html>
<head>
<meta charset="utf-8">
<meta name="viewport" content="width=device-width, initial-scale=1">
<link rel="stylesheet" href="https://stackpath.bootstrapcdn.com/bootstrap/4.3.1/css/bootstrap.min.css">
<script src="https://obniz.io/js/jquery-3.2.1.min.js"></script>
<script src="https://unpkg.com/obniz@3.24.0/obniz.js" crossorigin="anonymous"></script>
</head>
<body>
<h1>Hello obniz!!!</h1>
<div id="obniz-debug"></div>
<script>
// 今回の obniz を指示するための設定
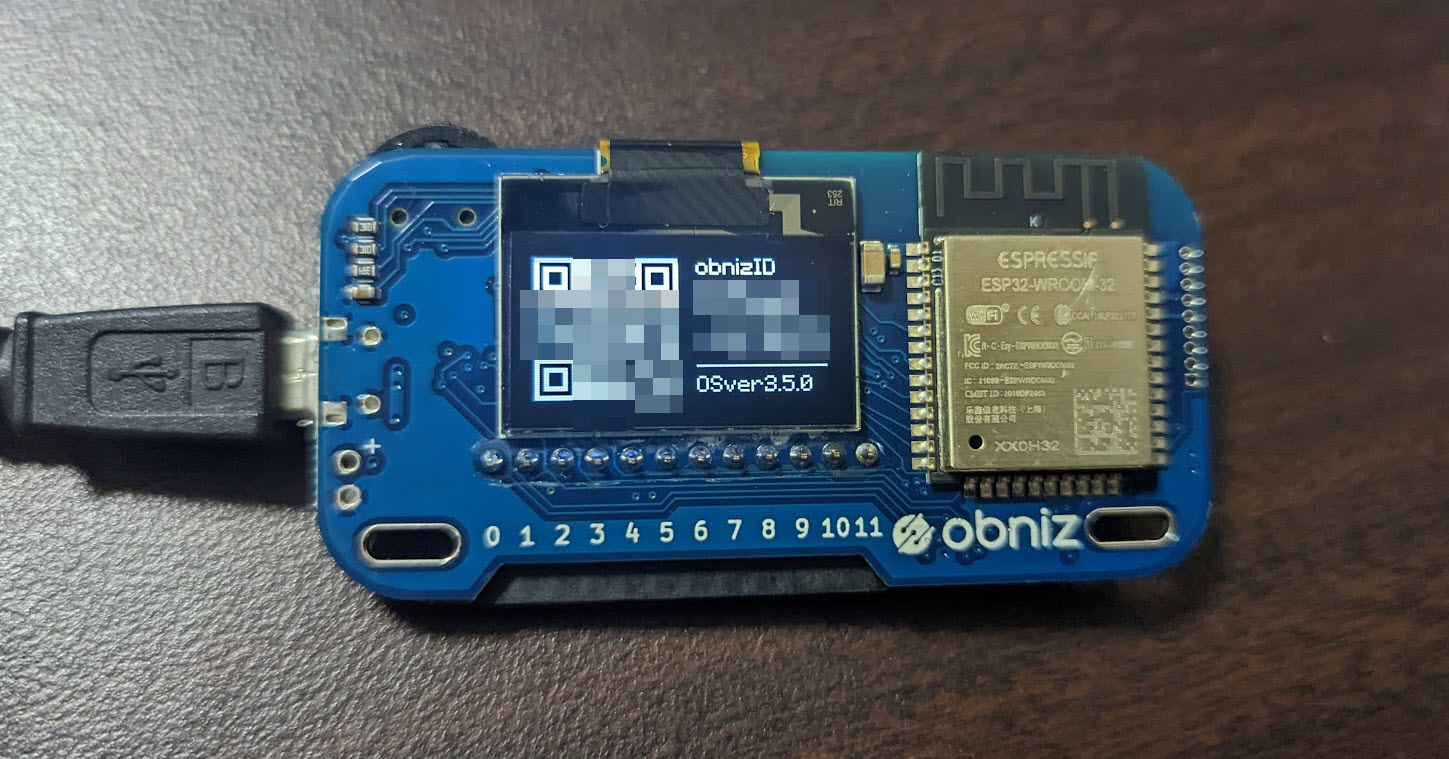
const obniz = new Obniz("OBNIZ_ID_HERE");
// 接続後、サーボに指示を出す
obniz.onconnect = async function () {
obniz.display.clear();
obniz.display.print("[servo]");
// サーボの呼び出し
const servo = obniz.wired("ServoMotor", {gnd:0,vcc:1,signal:2});
// 90 度
servo.angle(90);
// 3秒待つ
await obniz.wait(3000);
// 0 度
servo.angle(0);
// 3秒待つ
await obniz.wait(3000);
// 180 度
servo.angle(180);
// 3秒待つ
await obniz.wait(3000);
// 0 度
servo.angle(0);
}
</script>
</body>
</html>
動かしてみる
右上の実行ボタンをクリックして、実行してみましょう。
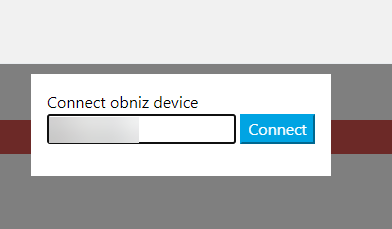
Obniz ID を確認して Connect をクリックします。
終了する
右上の終了ボタンをクリックします。
終了をすると obniz が処理待ちに戻ります。
90 度 → 0 度 → 180 度 → 0 度 とサーボモータが動きます。