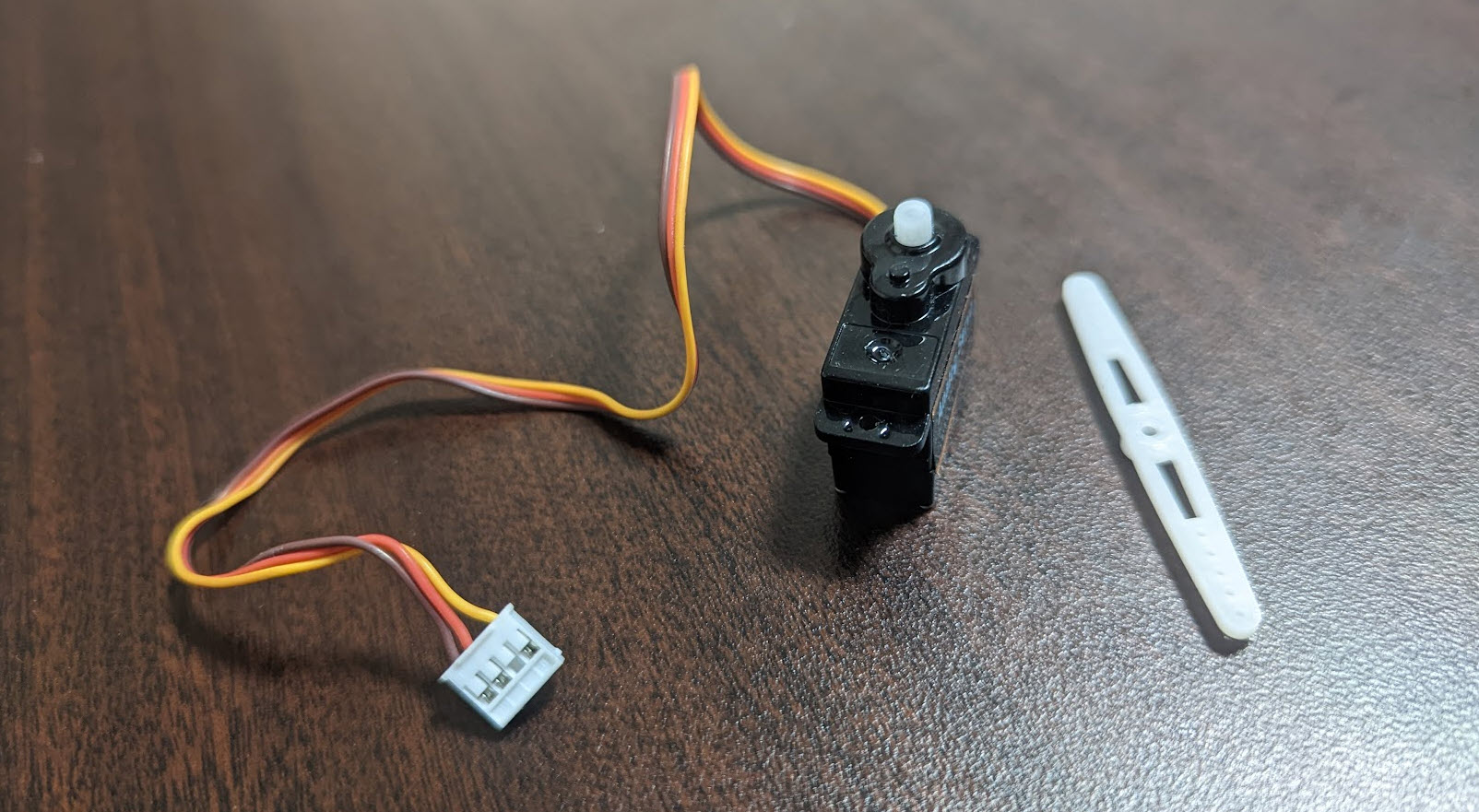
Grove サーボモータ
今回のプログラムはどのように動くか
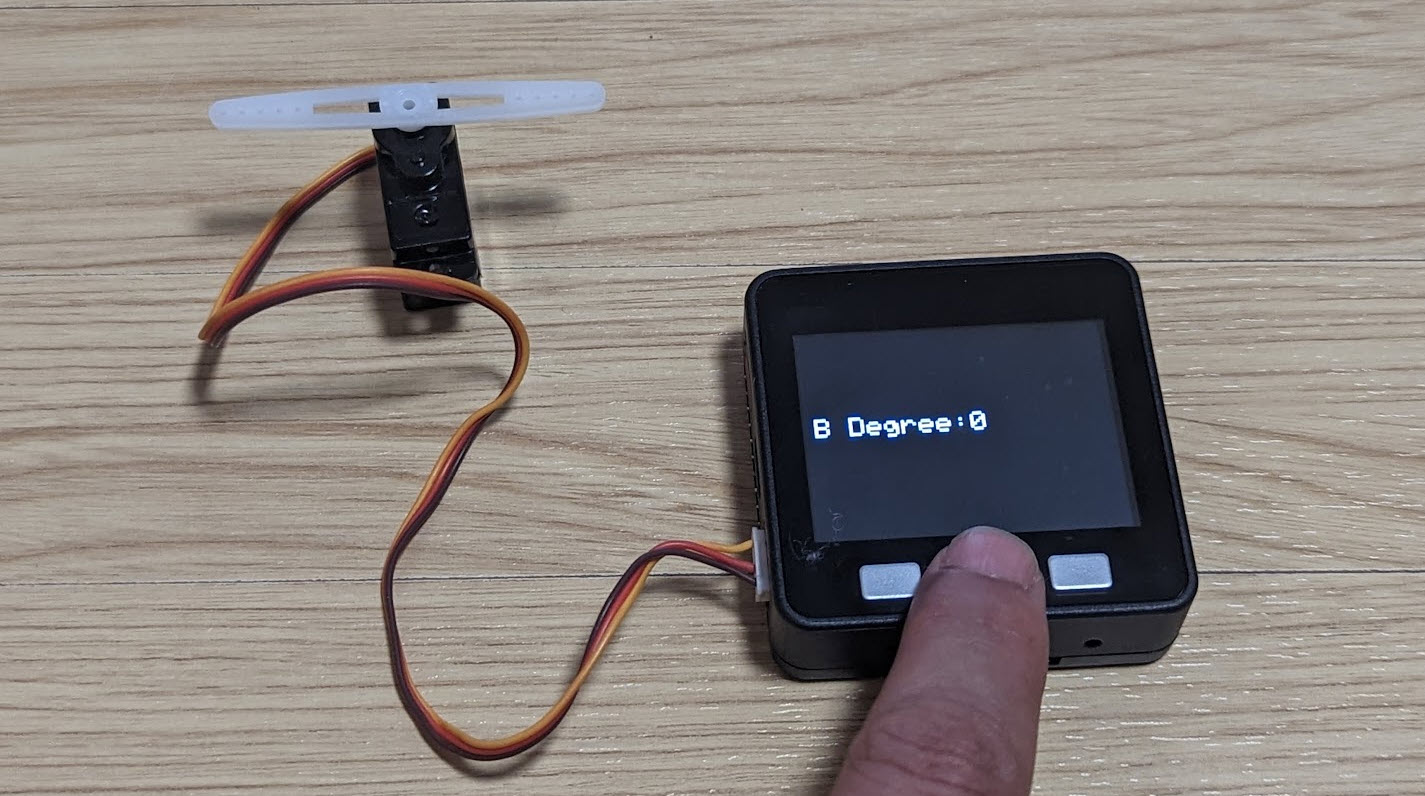
書き込むと A ボタンで -90 度、B ボタンで 0 度、C ボタンで 90 度にサーボモータの角度が操れます。
Grove への Grove ケーブルのつなぎかた
今回はサーボモータに直接つながっているので Grove 変換ケーブルをつなぐ必要はありません。
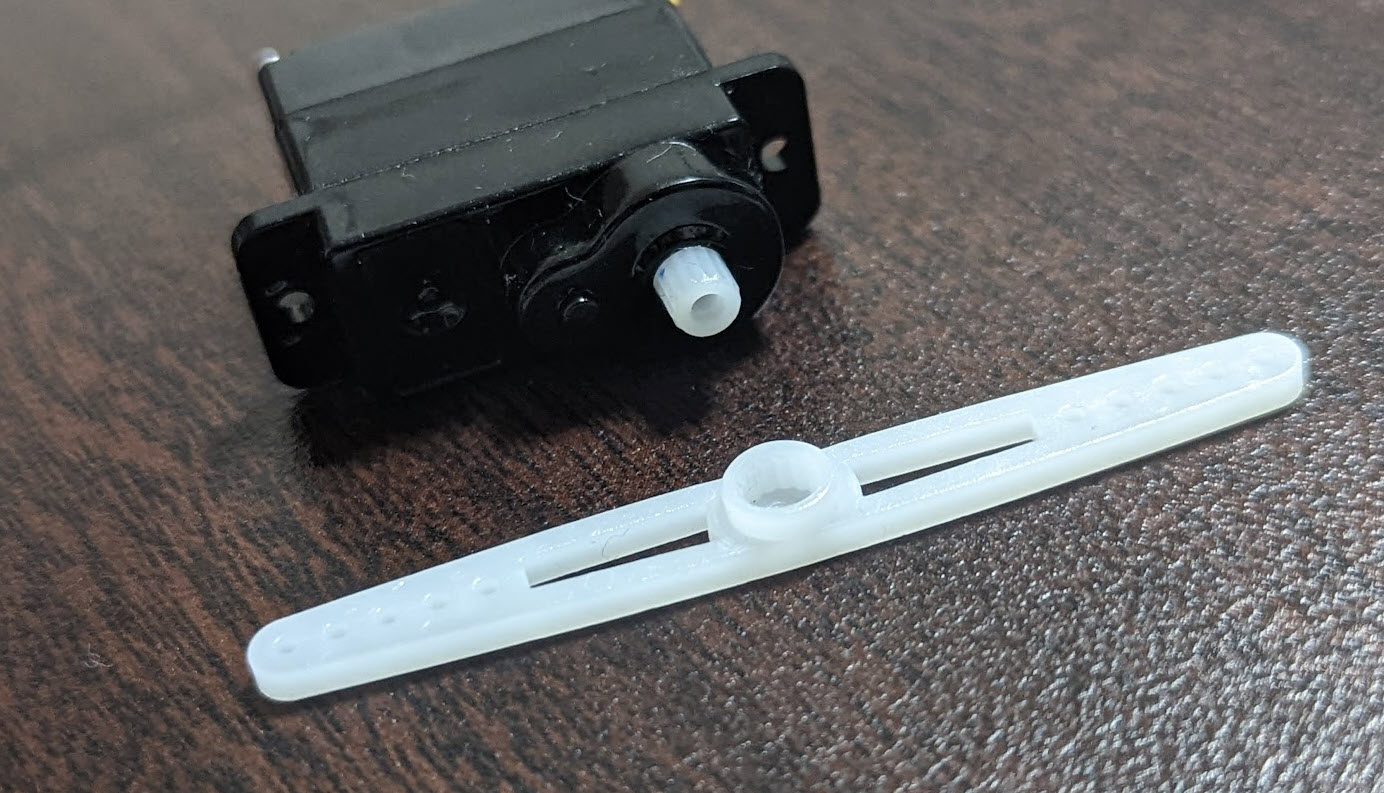
サーボモータにパーツを装着
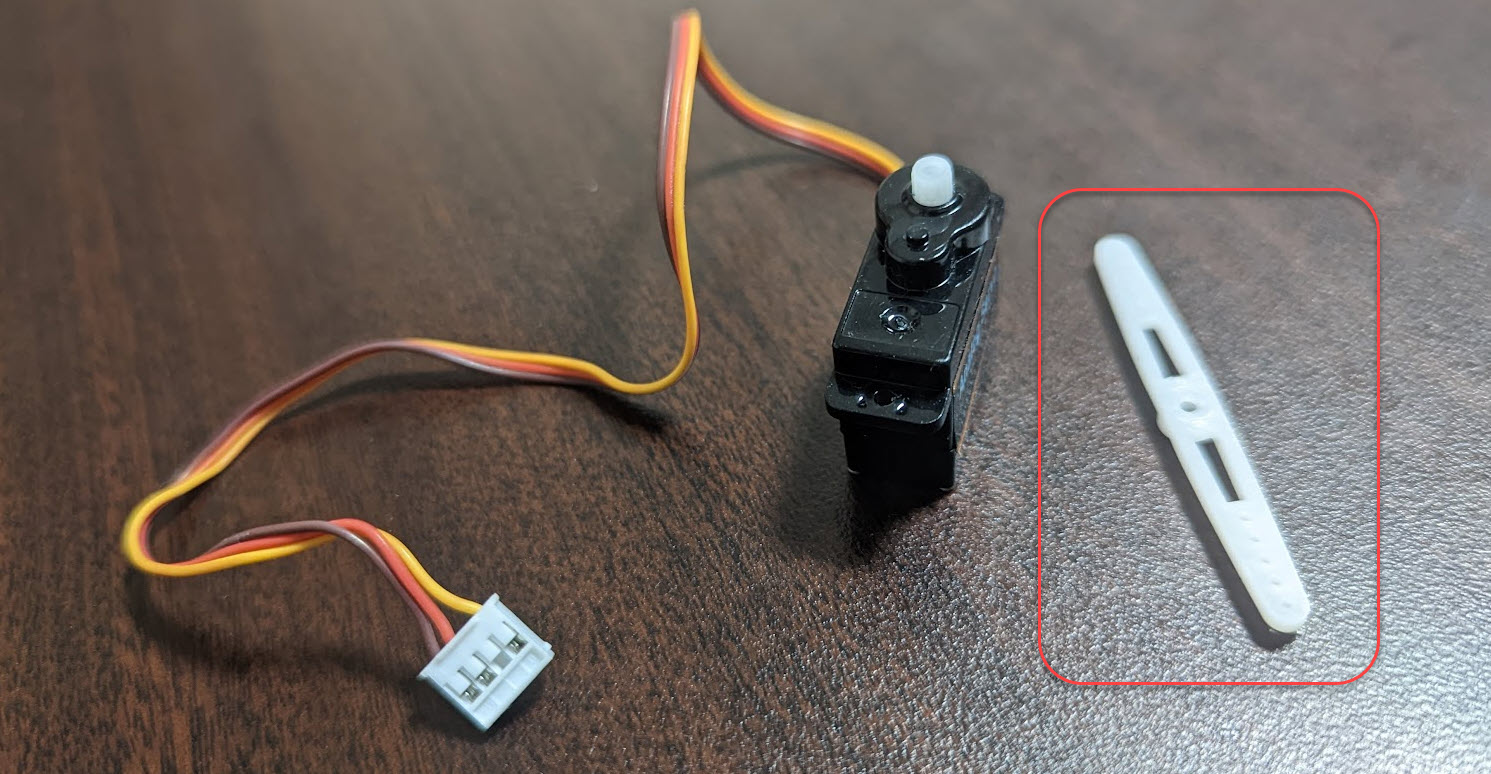
サーボモータと同行されているパーツのうち、こちらの白いプラスチック製の長いパーツを取り出します。
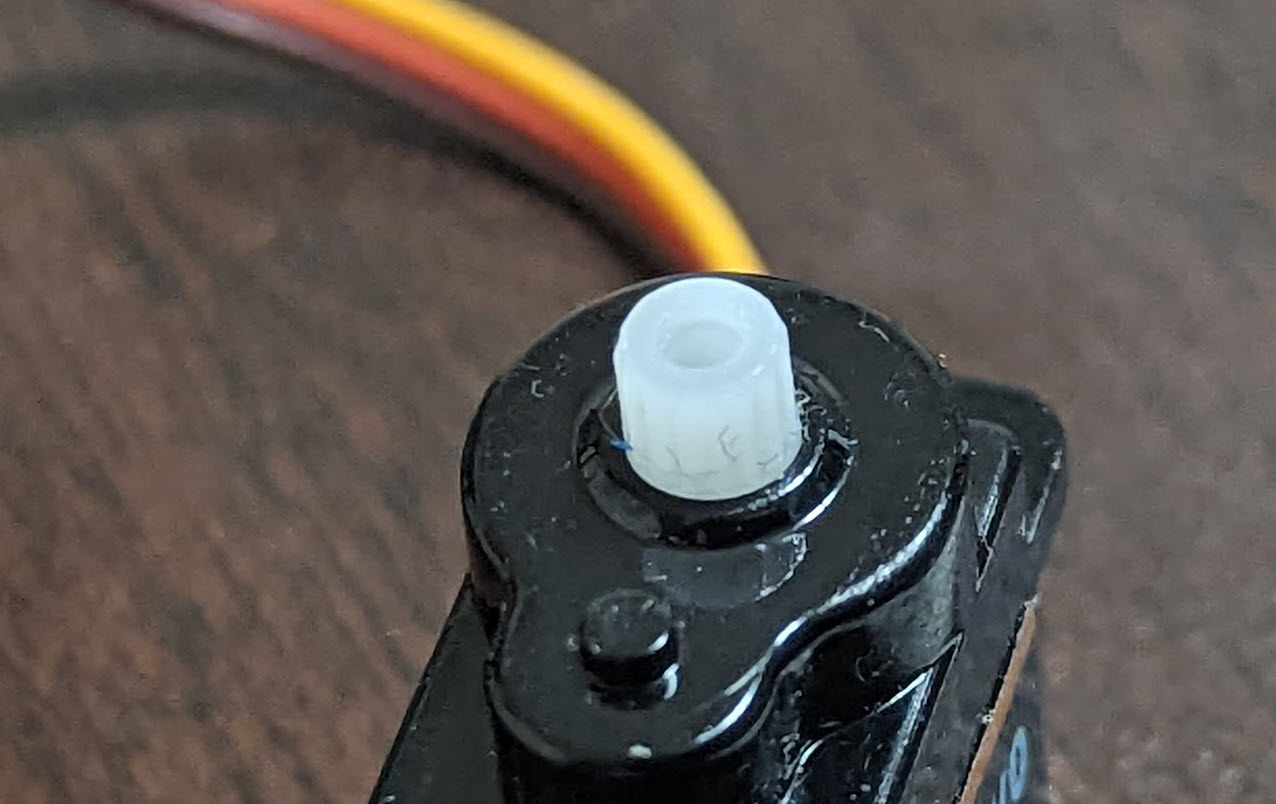
サーボ側の白い出っ張りのギザギザと、

パーツ側のギザギザの凹みを合わせてはめ込みます。
よく確認しましょう。
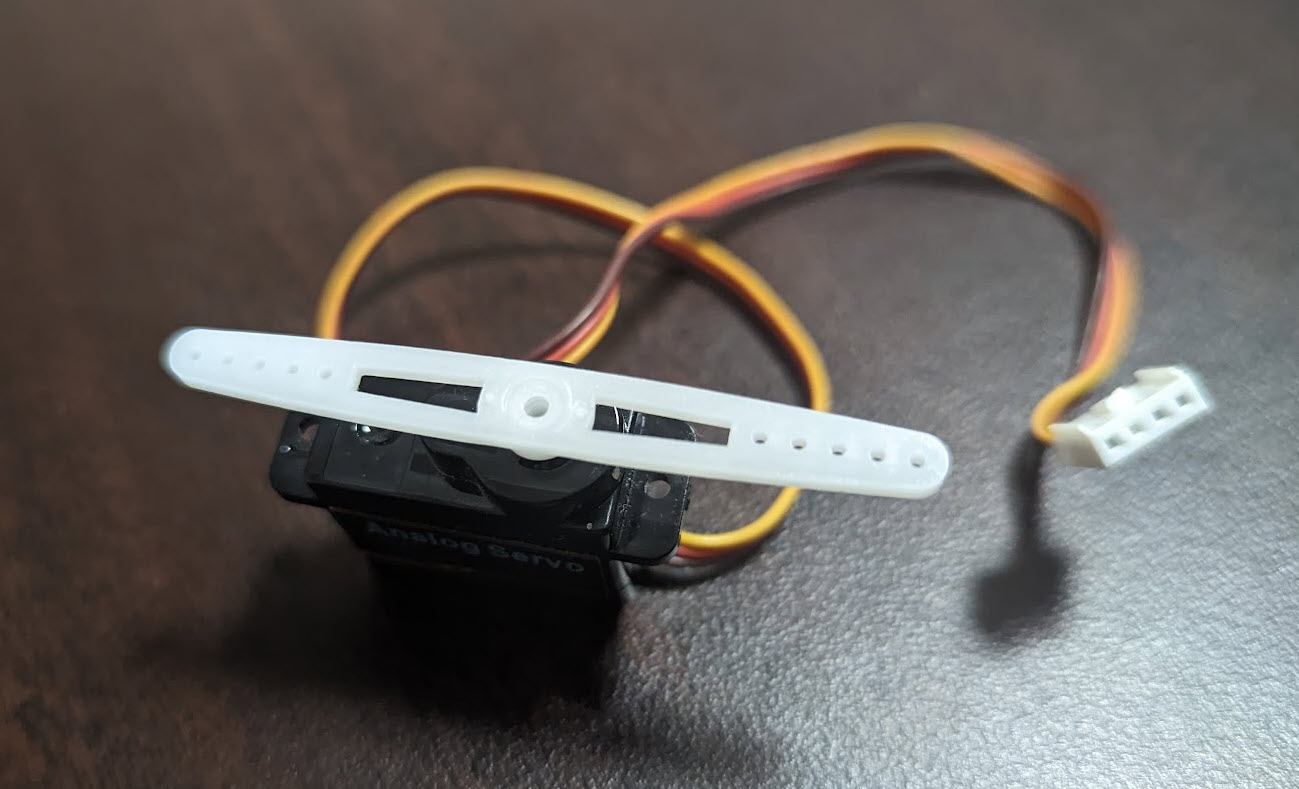
はめ込むことで角度の変化がより分かりやすくなります。
実際にこのパーツ含めたパーツ群は、何かを動かすときに力を伝えるための軸の役割しています。
PORT A という Grove ポートを確認
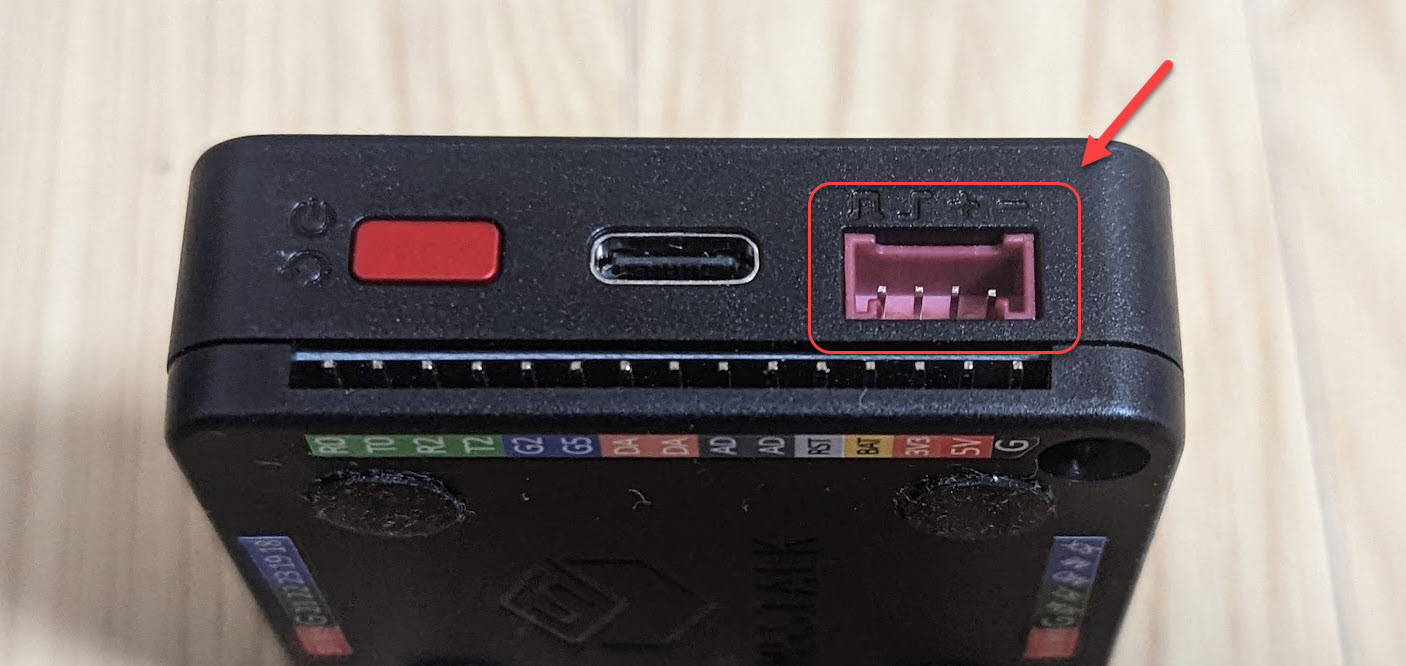
今回は PORT A という Grove ポートにつなぐので確認します。
GPIO としては 21 と 22 で操作できます。今回は 22 で指示を出します。
M5Stack への Grove ケーブルのつなぎかた

PORT A に挿しこみます。

このように接続できます。
ソースコードを反映&保存
Arduino IDE で新規ファイルを作成し、以下のコードをコピーアンドペーストします。こちらを handson-Servo というファイル名で保存します。
#include <M5Stack.h>
#define SERVO_MIN_WIDTH_MS 0.6
#define SERVO_MAX_WIDTH_MS 2.4
#define LEDC_CHANNEL_3 3 // LEDCのチャンネル指定
#define LEDC_TIMER_BIT 16 // LEDCのPWMタイマーの精度設定
#define LEDC_SERVO_FREQ 50 // サーボ信号の1サイクル 50Hz:20ms
#define SERVO_PIN 22 // Servo ピン
void setup() {
M5.begin(
true, // LCD ディスプレイ ON
false, // SDカードは動かさない設定
true, // シリアル ON
false // I2C 無効(PORT A を GPIO で使用するため)
);
// スタート
M5.Lcd.fillScreen(BLACK);
M5.Lcd.setCursor(10, 100);
M5.Lcd.setTextColor(WHITE);
M5.Lcd.setTextSize(3);
// Arduino のシリアルモニタ・M5Stack LCDディスプレイ両方にメッセージを出す
Serial.print("Servo"); // Arduino のシリアルモニタにメッセージを出す
M5.Lcd.print("Servo"); // M5Stack LCDディスプレイにメッセージを出す(英語のみ)
// servoモーター設定
servo_setup();
}
// サーボ角度 PWM 補助
int servo_pwm_count(int v)
{
float vv = (v + 90) / 180.0 ;
return (int)(65536 * (SERVO_MIN_WIDTH_MS + vv * (SERVO_MAX_WIDTH_MS -SERVO_MIN_WIDTH_MS)) / 20.0) ;
}
// サーボ設定
void servo_setup(){
// 16ビット精度で制御
ledcSetup(LEDC_CHANNEL_3, LEDC_SERVO_FREQ, LEDC_TIMER_BIT) ;
// CH3 を SERVO にする
ledcAttachPin(SERVO_PIN, LEDC_CHANNEL_3) ;
}
// サーボの角度を設定
void servo_degree(int degree){
ledcWrite(LEDC_CHANNEL_3, servo_pwm_count(degree)) ;
}
void loop() {
M5.update();
if (M5.BtnA.wasReleased()) {
// A ボタン
M5.Lcd.fillScreen(BLACK);
M5.Lcd.setCursor(10, 100);
M5.Lcd.setTextColor(WHITE);
M5.Lcd.setTextSize(3);
Serial.print("A"); //
M5.Lcd.print("A Degree:90"); //
// サーボの角度を設定
servo_degree(90) ;
} else if (M5.BtnB.wasReleased()) {
// B ボタン
M5.Lcd.fillScreen(BLACK);
M5.Lcd.setCursor(10, 100);
M5.Lcd.setTextColor(WHITE);
M5.Lcd.setTextSize(3);
Serial.print("B"); //
M5.Lcd.print("B Degree:0"); //
// サーボの角度を設定
servo_degree(0) ;
} else if (M5.BtnC.wasReleased()) {
// C ボタン
M5.Lcd.fillScreen(BLACK);
M5.Lcd.setCursor(10, 100);
M5.Lcd.setTextColor(WHITE);
M5.Lcd.setTextSize(3);
Serial.print("C"); //
M5.Lcd.print("C Degree:-90"); //
// サーボの角度を設定
servo_degree(-90) ;
}
}
M5Stack に書き込んでみる

M5Stack に書き込んでみましょう。
動かしてみる
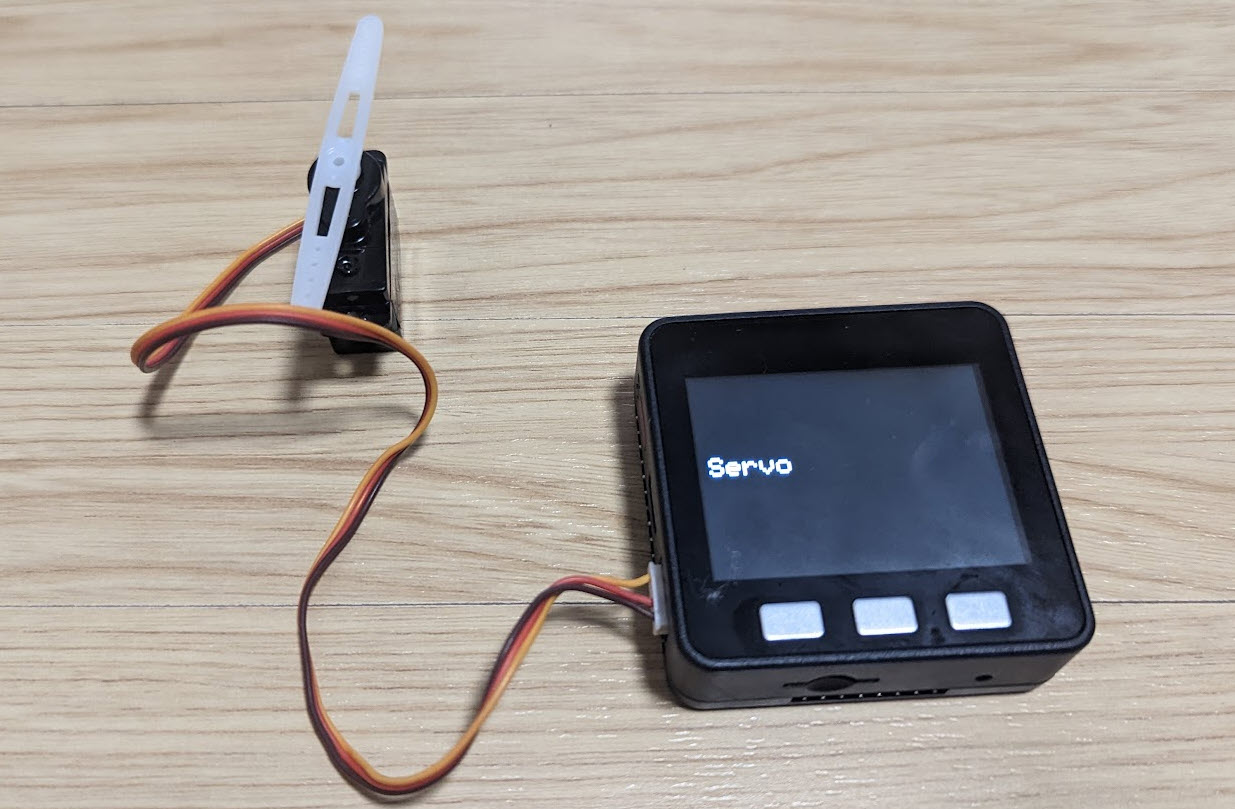
動かしてみると、Servo という文字が現れます。
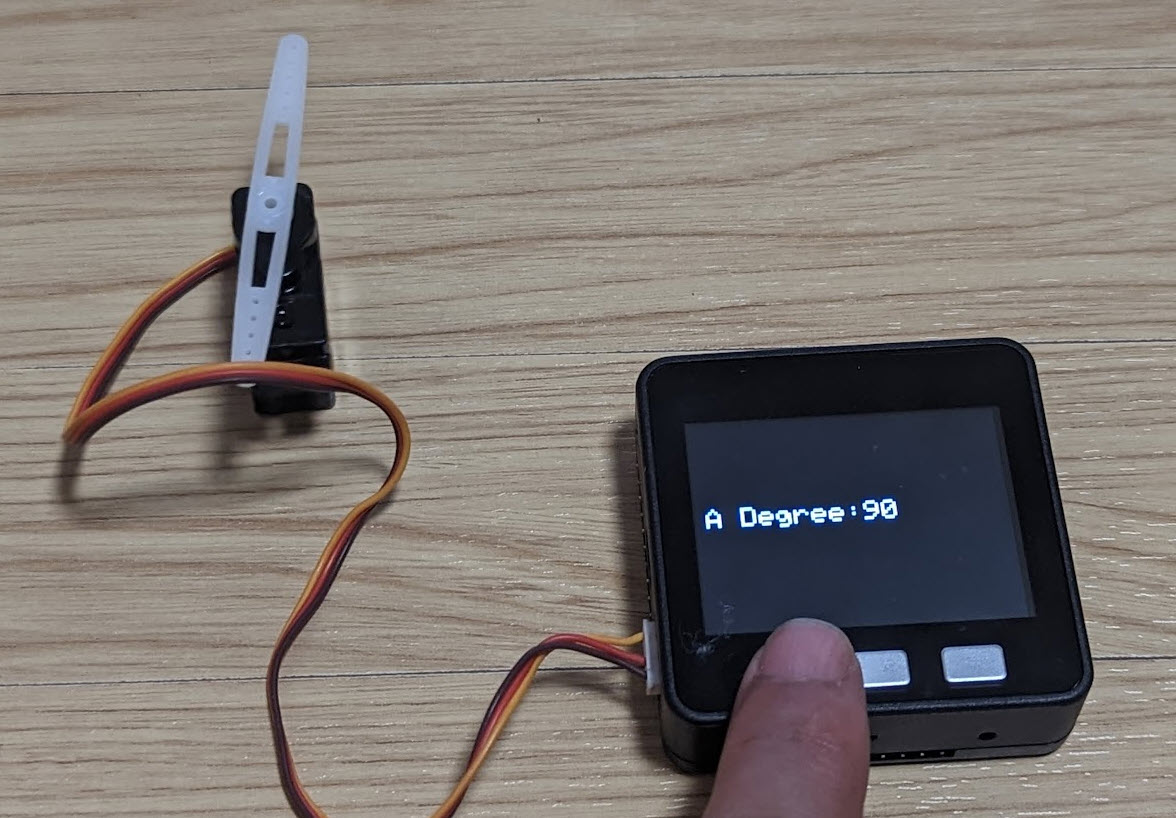
A ボタンで -90 度、B ボタンで 0 度、C ボタンで 90 度にサーボモータの角度が操れます。
MQTT と連携するソースコードを試す
つづいて、MQTT 連携です。
たとえば
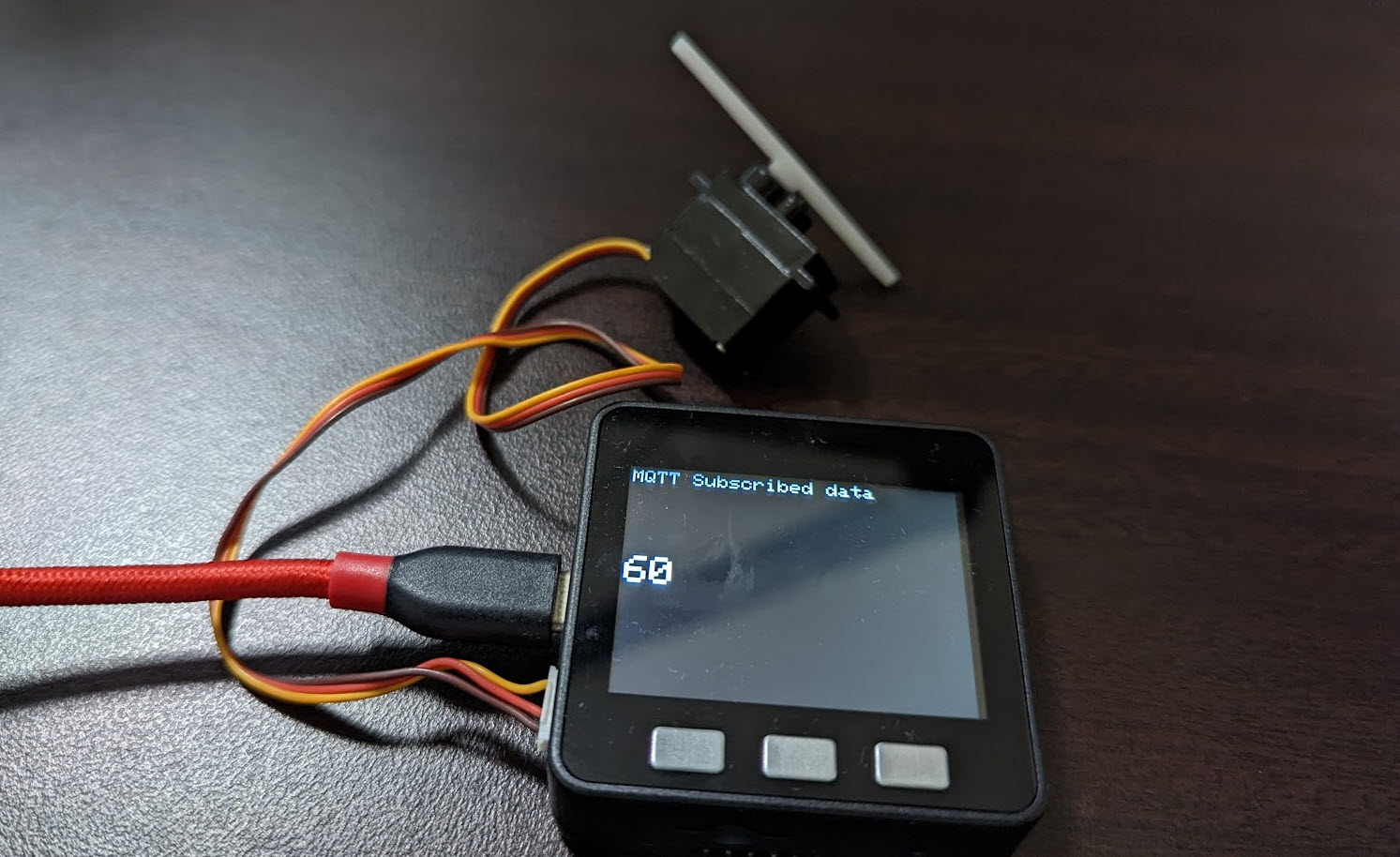
{"type":"control","control":60}
と受け取る 60 度に制御できる仕組みです。
Arduino IDE で新規ファイルを作成し、以下のコードをコピーアンドペーストします。こちらを handson-Servo-MQTT というファイル名で保存します。
#include <M5Stack.h>
#define SERVO_MIN_WIDTH_MS 0.6
#define SERVO_MAX_WIDTH_MS 2.4
#define LEDC_CHANNEL_3 3 // LEDCのチャンネル指定
#define LEDC_TIMER_BIT 16 // LEDCのPWMタイマーの精度設定
#define LEDC_SERVO_FREQ 50 // サーボ信号の1サイクル 50Hz:20ms
#define SERVO_PIN 22 // Servo ピン
// Wi-Fi をつなぐためのライブラリ
// 今回は MQTT のため
#include <WiFiClient.h>
#include <WiFi.h>
// MQTT をつなぎためのライブラリ
// 今回追加インストールする
#include <PubSubClient.h> // インストールすれば色がつく
// JSON を扱いやすくするライブラリ
#include <ArduinoJson.h> // こちらは色がついてなくてOK
// Wi-FiのSSID
char *ssid = "Wi-FiのSSID";
// Wi-Fiのパスワード
char *password = "Wi-Fiのパスワード";
// 今回使いたい MQTT のブローカーのアドレス
const char *mqttEndpoint = "今回使いたい MQTT のブローカーのアドレス";
// 今回使いたい MQTT のポート
const int mqttPort = 1883;
// 今回使いたい MQTT のユーザー名
const char *mqttUsername = "今回使いたい MQTT のユーザー名";
// 今回使いたい MQTT のパスワード
const char *mqttPassword = "今回使いたい MQTT のパスワード";
// デバイスID
// デバイスIDは機器ごとにユニークにします
// YOURNAME を自分の名前の英数字に変更します
// デバイスIDは同じMQTTブローカー内で重複すると大変なので、後の処理でさらにランダム値を付与してますが、名前を変えるのが確実なので、ちゃんと変更しましょう。
char *deviceID = "M5Stack-YOURNAME";
// MQTT メッセージを LINE BOT に知らせるトピック
char *pubTopic = "handson/data";
// MQTT メッセージを LINE BOT から待つトピック
char *subTopic = "handson/data";
// JSON 送信時に使う buffer
char pubJson[255];
// PubSubClient まわりの準備
WiFiClient httpClient;
PubSubClient mqttClient(httpClient);
void setup() {
// init lcd, serial, but don't init sd card
// LCD ディスプレイとシリアルは動かして、SDカードは動かさない設定
M5.begin(true, false, true);
// スタート
M5.Lcd.fillScreen(BLACK);
M5.Lcd.setCursor(0, 0);
M5.Lcd.setTextColor(WHITE);
M5.Lcd.setTextSize(2);
// Arduino のシリアルモニタ・M5Stack LCDディスプレイ両方にメッセージを出す
Serial.print("START"); // Arduino のシリアルモニタにメッセージを出す
M5.Lcd.print("START"); // M5Stack LCDディスプレイにメッセージを出す(英語のみ)
// WiFi 接続開始
WiFi.begin(ssid, password);
// 勝手に Button A が押されることを回避
WiFi.setSleep(false);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
// Arduino のシリアルモニタ・M5Stack LCDディスプレイ両方にメッセージを出す
Serial.print(".");
M5.Lcd.print(".");
}
// WiFi Connected
// WiFi 接続完了
M5.Lcd.setCursor(10, 40);
M5.Lcd.setTextColor(WHITE);
M5.Lcd.setTextSize(2);
// Arduino のシリアルモニタ・M5Stack LCDディスプレイ両方にメッセージを出す
// 前のメッセージが print で改行入っていないので println で一つ入れる
Serial.println(""); // Arduino のシリアルモニタにメッセージを出し改行が最後に入る
M5.Lcd.println(""); // M5Stack LCDディスプレイにメッセージを出す改行が最後に入る(英語のみ)
// Arduino のシリアルモニタ・M5Stack LCDディスプレイ両方にメッセージを出す
Serial.println("WiFi Connected."); // Arduino のシリアルモニタにメッセージを出す
M5.Lcd.println("WiFi Connected."); // M5Stack LCDディスプレイにメッセージを出す(英語のみ)
// ちゃんとつながったと分かるために 2 秒待ってから MQTT の処理に行く
delay(2000);
// MQTT の接続先設定
mqttClient.setServer(mqttEndpoint, mqttPort);
// MQTT のデータを受け取った時(購読時)の動作を設定
mqttClient.setCallback(mqttCallback);
// MQTT の接続
mqttConnect();
// servoモーター設定
servo_setup();
}
// サーボ角度 PWM 補助
int servo_pwm_count(int v)
{
float vv = (v + 90) / 180.0 ;
return (int)(65536 * (SERVO_MIN_WIDTH_MS + vv * (SERVO_MAX_WIDTH_MS -SERVO_MIN_WIDTH_MS)) / 20.0) ;
}
// サーボ設定
void servo_setup(){
// 16ビット精度で制御
ledcSetup(LEDC_CHANNEL_3, LEDC_SERVO_FREQ, LEDC_TIMER_BIT) ;
// CH3 を SERVO にする
ledcAttachPin(SERVO_PIN, LEDC_CHANNEL_3) ;
}
// サーボの角度を設定
void servo_degree(int degree){
ledcWrite(LEDC_CHANNEL_3, servo_pwm_count(degree)) ;
}
void mqttConnect() {
M5.Lcd.fillScreen(BLACK);
M5.Lcd.setCursor(0, 0);
M5.Lcd.setTextColor(WHITE);
M5.Lcd.setTextSize(2);
// MQTT clientID のランダム化(名称重複対策)
char clientID[40] = "clientID";
String rndNum = String(random(0xffffff), HEX);
String deviceIDRandStr = String(deviceID);
deviceIDRandStr.concat("-");
deviceIDRandStr.concat(rndNum);
deviceIDRandStr.toCharArray(clientID, 40);
M5.Lcd.println("[MQTT]");
M5.Lcd.println("");
M5.Lcd.printf("- clientID ");
M5.Lcd.println("");
M5.Lcd.println(clientID);
// 接続されるまで待ちます
while (!mqttClient.connected()) {
if (mqttClient.connect(clientID,mqttUsername,mqttPassword)) {
Serial.println("Connected.");
M5.Lcd.println("");
M5.Lcd.println("- MQTT Connected.");
// subTopic 変数で指定されたトピックに向けてデータを送ります
int qos = 0;
mqttClient.subscribe(subTopic, qos);
Serial.println("Subscribe start.");
M5.Lcd.println("");
M5.Lcd.println("- MQTT Subscribe start.");
M5.Lcd.println(subTopic);
// 初回データ送信 publish ///////////
// データ送信のための JSON をつくる
DynamicJsonDocument doc(1024);
doc["type"] = "message";
doc["message"] = "Connected";
// pubJson という変数に JSON 文字列化されたものが入る
serializeJson(doc, pubJson);
// pubTopic 変数で指定されたトピックに向けてデータを送ります
mqttClient.publish(pubTopic, pubJson);
} else {
// MQTT 接続エラーの場合はつながるまで 5 秒ごとに繰り返します
Serial.print("Failed. Error state=");
Serial.println(mqttClient.state());
// Wait 5 seconds before retrying
delay(5000);
}
}
}
// JSON を格納する StaticJsonDocument を準備
StaticJsonDocument<2048> jsonData;
// MQTT のデータを受け取った時(購読時)の動作を設定
void mqttCallback (char* topic, byte* payload, unsigned int length) {
// データ取得
String str = "";
Serial.print("Received. topic=");
Serial.println(topic);
for (int i = 0; i < length; i++) {
Serial.print((char)payload[i]);
str += (char)payload[i];
}
Serial.print("\n");
// 来た文字列を JSON 化して扱いやすくする
// 変換する対象は jsonData という変数
DeserializationError error = deserializeJson(jsonData, str);
// JSON パースのテスト
if (error) {
Serial.print(F("deserializeJson() failed: "));
Serial.println(error.f_str());
return;
}
// 以下 jsonData 内が JSON として呼び出せる
M5.Lcd.fillScreen(BLACK);
M5.Lcd.setCursor(0, 0);
M5.Lcd.setTextColor(WHITE);
M5.Lcd.setTextSize(2);
M5.Lcd.println("MQTT Subscribed data");
// Serial.println(jsonData["type"]);
// タイプの取り出し
// https://arduinojson.org/v6/example/parser/
String type = jsonData["type"];
// Serial.println(jsonData["type"]);
if(type == "control"){
// コントロール値を取り出し
const int control = jsonData["control"];
// データの表示
M5.Lcd.setCursor(0, 60);
M5.Lcd.setTextSize(4);
M5.Lcd.println("control:");
M5.Lcd.println(control);
// サーボの角度変更
servo_degree(control);
} else {
// メッセージを取り出し
const char* message = jsonData["message"];
// データの表示
M5.Lcd.setCursor(0, 60);
M5.Lcd.setTextSize(4);
M5.Lcd.println("message:");
M5.Lcd.println(message);
}
}
// 常にチェックして切断されたら復帰できるようにする対応
void mqttLoop() {
if (!mqttClient.connected()) {
mqttConnect();
}
mqttClient.loop();
}
void loop() {
M5.update();
// 常にチェックして切断されたら復帰できるようにする対応
mqttLoop();
}
Wi-Fi 情報を反映
// Wi-FiのSSID
char *ssid = "Wi-FiのSSID";
// Wi-Fiのパスワード
char *password = "Wi-Fiのパスワード";
自分のつなぎたい Wi-Fi の SSID とパスワードを反映します。
MQTT の接続設定を反映
今回は私(講師)の方が、Beebotte というサービスで、ひとつブローカーを立ち上げているので、そのまま使いましょう。
// 今回使いたい MQTT のブローカーのアドレス
const char *mqttEndpoint = "今回使いたい MQTT のブローカーのアドレス";
// 今回使いたい MQTT のポート
const int mqttPort = 1883;
// 今回使いたい MQTT のユーザー名
const char *mqttUsername = "今回使いたい MQTT のユーザー名";
// 今回使いたい MQTT のパスワード
const char *mqttPassword = "今回使いたい MQTT のパスワード";
ここの設定をお知らせする設定で置き換えましょう。まるまる上書きします。
クライアントIDに自分の名前を反映します
このあと、MQTT のクライアントIDに自分の名前(英語)を反映します。英語で考えておきましょう。
// デバイスID
// デバイスIDは機器ごとにユニークにします
// YOURNAME を自分の名前の英数字に変更します
// デバイスIDは同じMQTTブローカー内で重複すると大変なので、後の処理でさらにランダム値を付与してますが、名前を変えるのが確実なので、ちゃんと変更しましょう。
char *deviceID = "M5Stack-YOURNAME";
たとえば、hogehoge さんなら YOURNAME を hogehoge に変更します。
// デバイスID
// デバイスIDは機器ごとにユニークにします
// YOURNAME を自分の名前の英数字に変更します
// デバイスIDは同じMQTTブローカー内で重複すると大変なので、後の処理でさらにランダム値を付与してますが、名前を変えるのが確実なので、ちゃんと変更しましょう。
char *deviceID = "M5Stack-hogehoge";
M5Stack に書き込んでみる
そして、もう一度保存します。(大事)
M5Stack に書き込んでみましょう。
動かしてみる
書き込みと同時に Connected というメッセージが MQTT ブローカーに送信されます。
半角英数字で MQTT ブローカーへメッセージが送信してみます。

M5Stack 側で MQTT ブローカーからこのメッセージを受け取るので M5Stack にメッセージが届きます。この例は Hello! を送った例です。
講師側からデータを送る
シンプルに MQTT ブローカーにデータを送ってみます。
MQTT Explorer
MQTT Explorer というツールを使ってシンプルに MQTT ブローカーにデータを送ってみます。
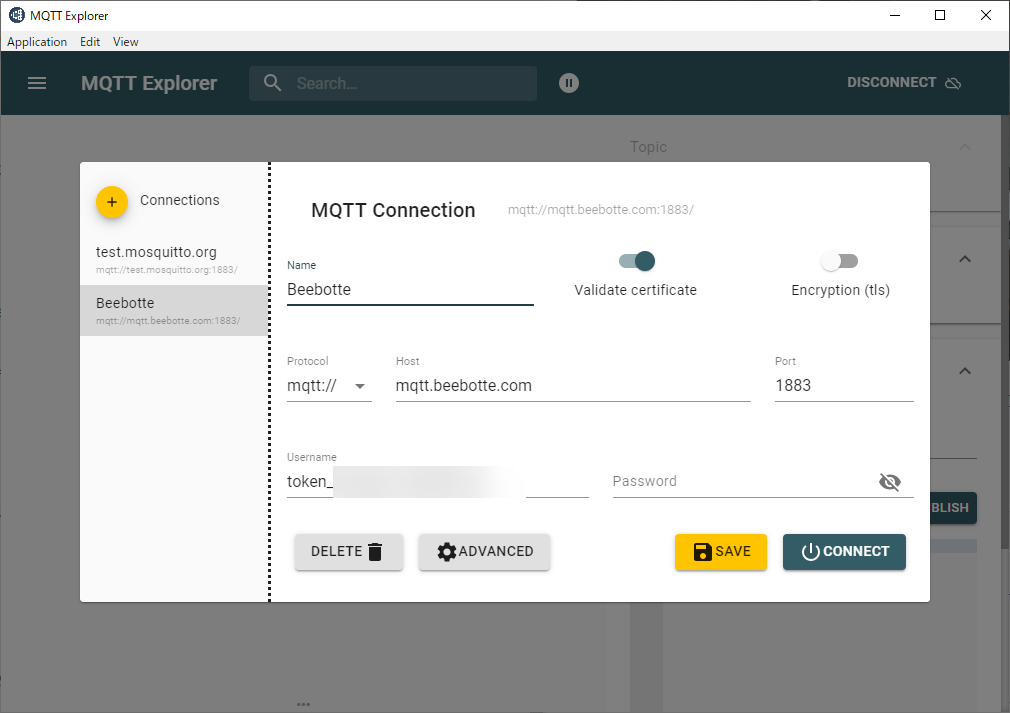
講師側で接続設定を行って Connect をクリックします。
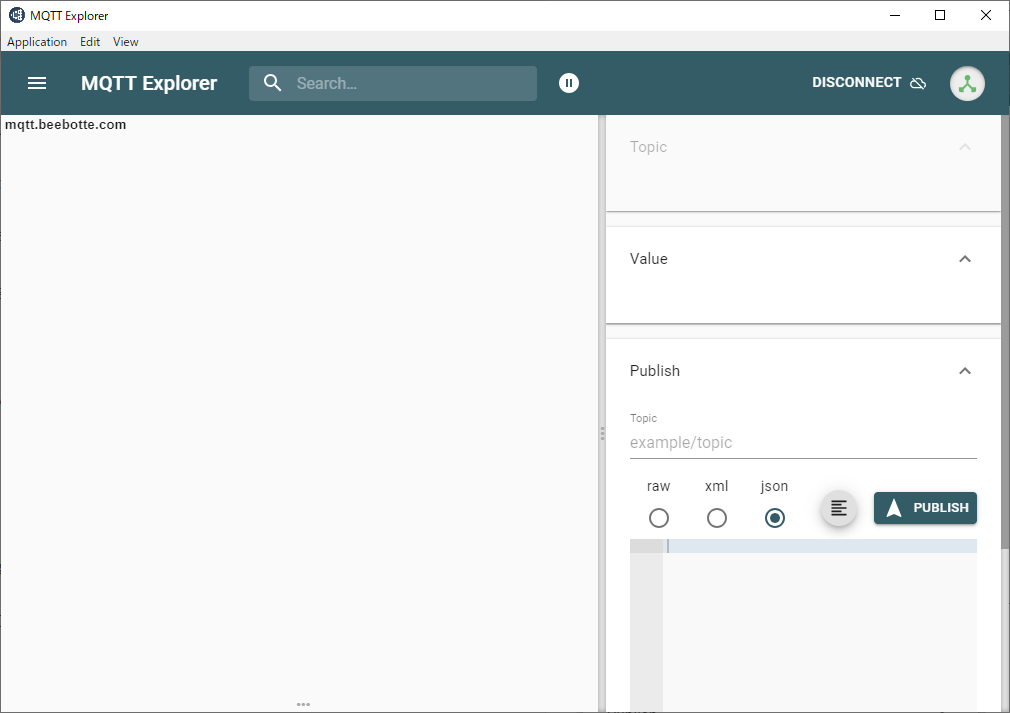
Publish 項目で設定してデータを送ります。
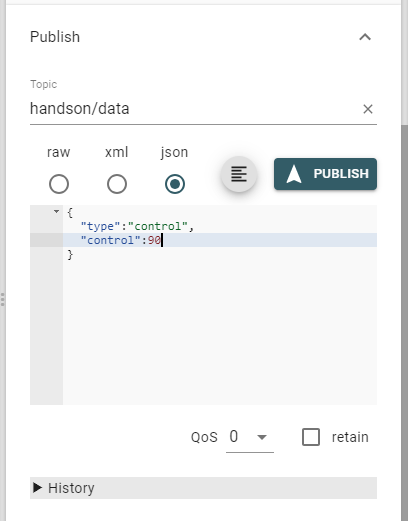
こんな設定です。
Node-RED(enebular)
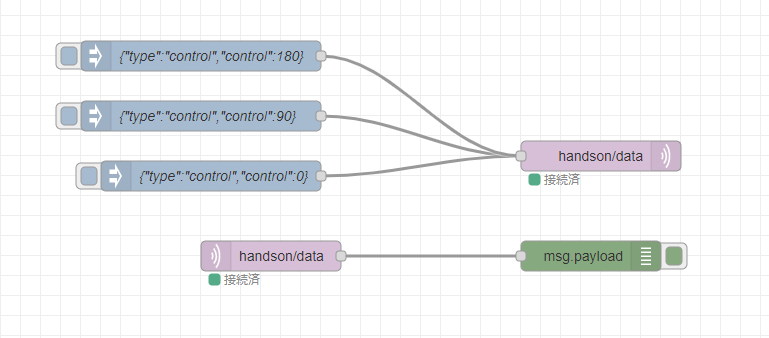
Node-RED(enebular) の MQTT ノードを使ってシンプルに MQTT ブローカーにデータを送ってみます。
次は
左のメニューから、次に進みましょう。